Add semi-continuous decisions
Source:R/add_semicontinuous_decisions.R
add_semicontinuous_decisions.RdAdd a semi-continuous decision to a conservation planning
problem. This is a relaxed decision where a part of a planning
unit can be prioritized, as opposed to the entire planning unit.
This decision is similar to the add_proportion_decisions()
function, except that it has an upper bound parameter. By default, the
decision can range from prioritizing none (0%) to all (100%) of a
planning unit. However, an upper bound can be specified to ensure that, at
most, only a fraction (e.g., 80%) of a planning unit can be prioritized. This
type of decision may be useful when it is not practical to conserve entire
planning units.
Arguments
- x
problem()object.- upper_limit
numericvalue specifying the maximum proportion of a planning unit that can be reserved (e.g., set to 0.8 for 80%).
Value
An updated problem() object with the decisions added to it.
Details
Conservation planning problems involve making decisions on planning
units. These decisions are then associated with actions (e.g., turning a
planning unit into a protected area). Only a
single decision should be added to a problem() object.
Note that if multiple decisions are added to an object, then the
last one to be added will be used during optimization.
Also, if no decision is
added to a problem(), then this decision will be used by default.
See also
See decisions for an overview of all functions for adding decisions.
Other decisions:
add_binary_decisions(),
add_proportion_decisions()
Examples
# set seed for reproducibility
set.seed(500)
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
sim_zones_pu_raster <- get_sim_zones_pu_raster()
sim_zones_features <- get_sim_zones_features()
# create minimal problem with semi-continuous decisions
p1 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_relative_targets(0.1) %>%
add_semicontinuous_decisions(0.5) %>%
add_default_solver(verbose = FALSE)
# solve problem
s1 <- solve(p1)
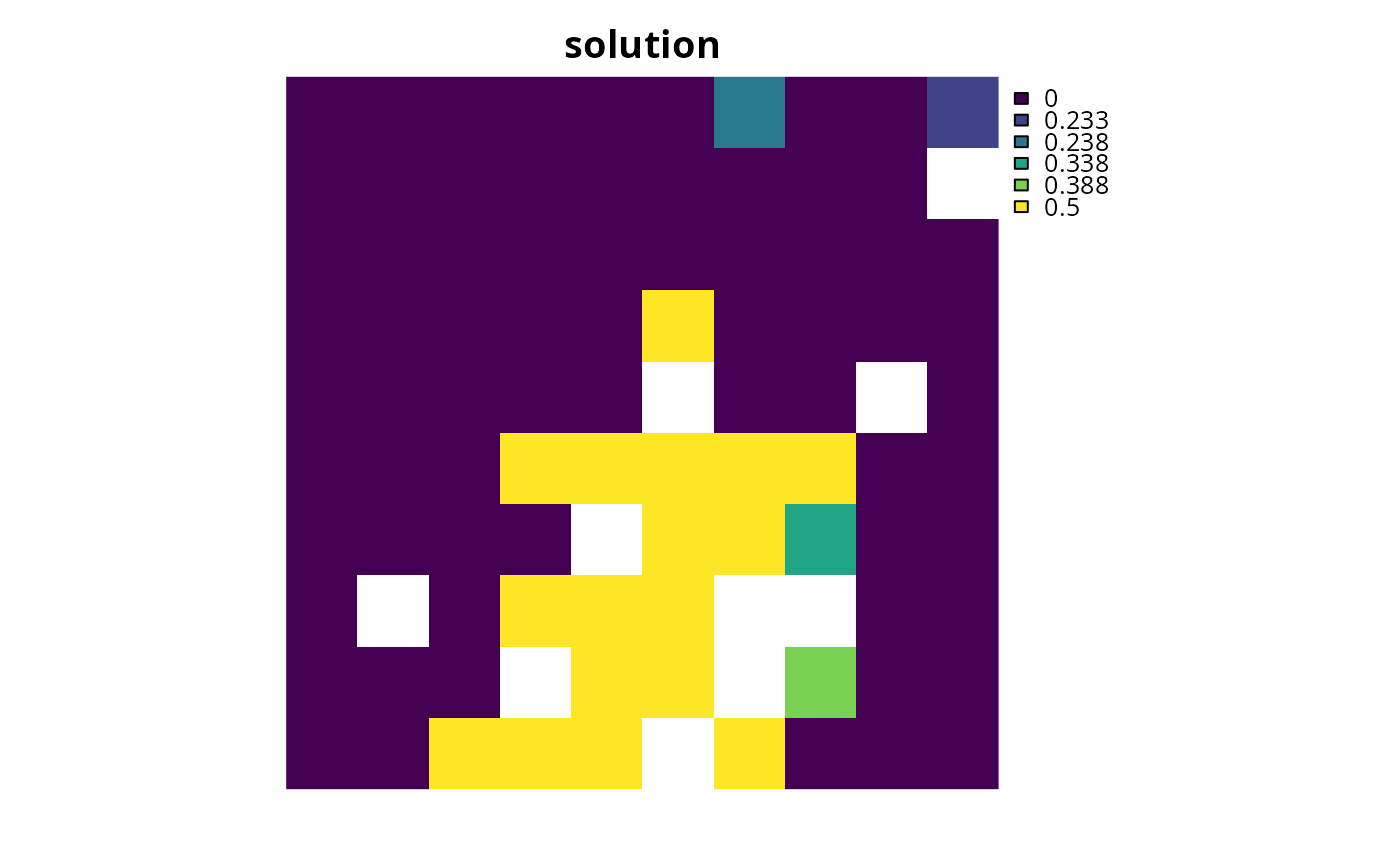
# plot solutions
plot(s1, main = "solution", axes = FALSE)
 # build multi-zone conservation problem with semi-continuous decisions
p2 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_relative_targets(matrix(runif(15, 0.1, 0.2), nrow = 5, ncol = 3)) %>%
add_semicontinuous_decisions(0.5) %>%
add_default_solver(verbose = FALSE)
# solve the problem
s2 <- solve(p2)
# print solution
print(s2)
#> class : SpatRaster
#> size : 10, 10, 3 (nrow, ncol, nlyr)
#> resolution : 0.1, 0.1 (x, y)
#> extent : 0, 1, 0, 1 (xmin, xmax, ymin, ymax)
#> coord. ref. : WGS 84 / Pseudo-Mercator (EPSG:3857)
#> source(s) : memory
#> varnames : sim_zones_pu_raster
#> sim_zones_pu_raster
#> sim_zones_pu_raster
#> names : zone_1, zone_2, zone_3
#> min values : 0, 0, 0
#> max values : 0.5, 0.5, 0.5
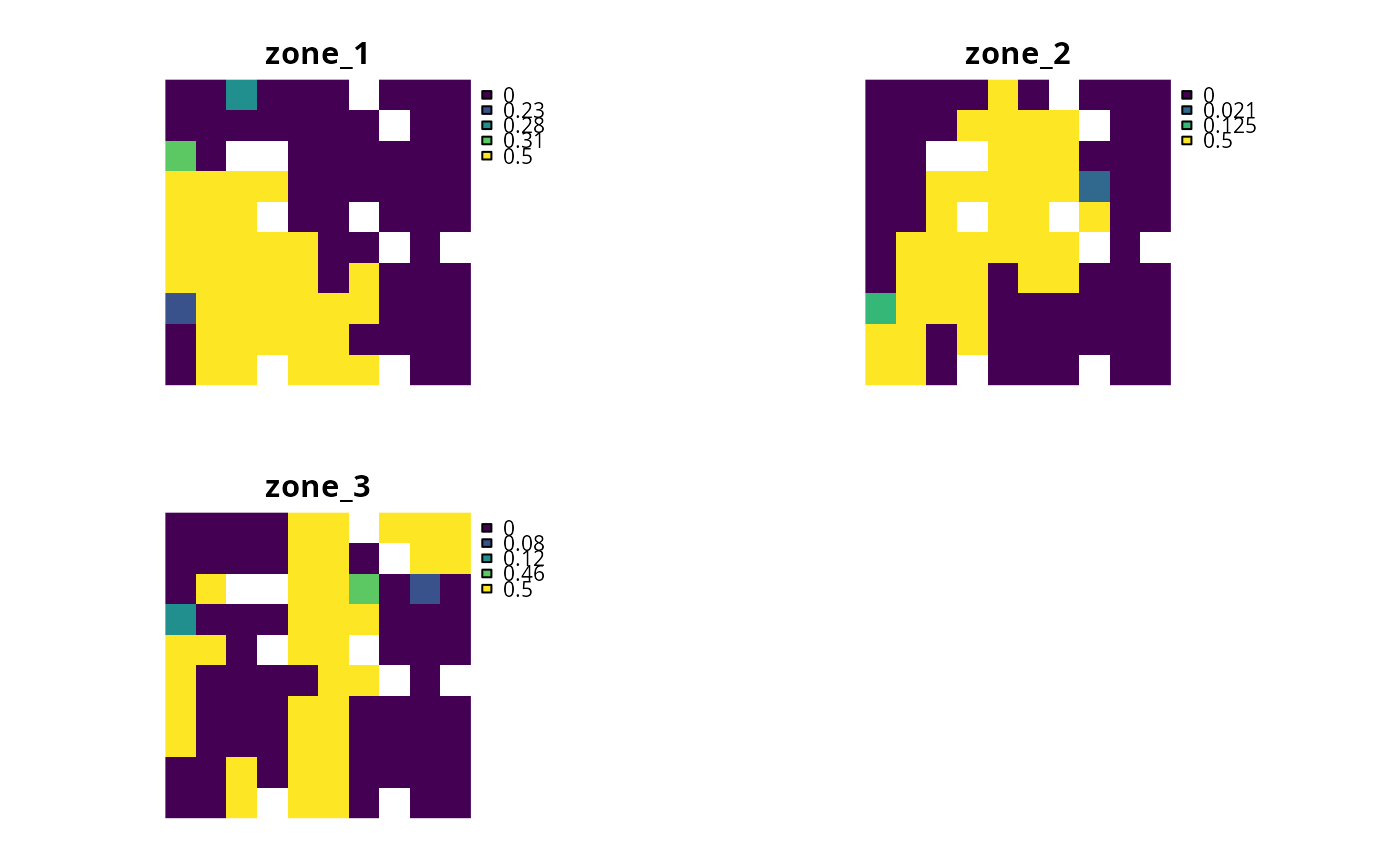
# plot solution
# panels show the proportion of each planning unit allocated to each zone
plot(s2, axes = FALSE)
# build multi-zone conservation problem with semi-continuous decisions
p2 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_relative_targets(matrix(runif(15, 0.1, 0.2), nrow = 5, ncol = 3)) %>%
add_semicontinuous_decisions(0.5) %>%
add_default_solver(verbose = FALSE)
# solve the problem
s2 <- solve(p2)
# print solution
print(s2)
#> class : SpatRaster
#> size : 10, 10, 3 (nrow, ncol, nlyr)
#> resolution : 0.1, 0.1 (x, y)
#> extent : 0, 1, 0, 1 (xmin, xmax, ymin, ymax)
#> coord. ref. : WGS 84 / Pseudo-Mercator (EPSG:3857)
#> source(s) : memory
#> varnames : sim_zones_pu_raster
#> sim_zones_pu_raster
#> sim_zones_pu_raster
#> names : zone_1, zone_2, zone_3
#> min values : 0, 0, 0
#> max values : 0.5, 0.5, 0.5
# plot solution
# panels show the proportion of each planning unit allocated to each zone
plot(s2, axes = FALSE)