Management zones tutorial
Source:vignettes/management_zones_tutorial.Rmd
management_zones_tutorial.RmdIntroduction
One of the main aims in conservation planning is to identify the most cost-effective set of areas to manage biodiversity (Margules & Pressey 2000). To achieve this, prioritizations are generally created to identify areas for expanding protected area systems. However, many real-world conservation problems do not simply involve deciding if an area should be protected or not (e.g., Klein et al. 2009; Stigner et al. 2016). Instead, many problems involve a range of different management categories and the goal is to determine which areas should be allocated to which management category. For example, a manager might have a range of different methods (e.g., baiting or trapping at various intensities) for controlling invasive pests in a set of different areas (e.g., Cattarino et al. 2018). They would need a prioritization that shows which control methods should be implemented in which areas. In this particular case, a binary prioritization showing which areas contain the most biodiversity is simply not helpful. Furthermore, many real-world problems require decisions that meet multiple, and sometimes conflicting, objectives from different stakeholders. For example, a manager might need to implement a set of no-take and partial-take areas to prevent overfishing, but also ensure that there still remain plenty of areas for fishing activities (e.g., Wilson et al. 2010; Klein et al. 2013). Popularized by the Marxan with Zones decision support tool (Watts et al. 2009), this concept has become known as “zones” and is becoming increasingly important in conservation planning.
The aim of this tutorial is to showcase the zones functionality of the prioritizr R package. It will assume a certain level of familiarity with conservation planning terminology and the package. If you don’t have much experience in either of these topics, we recommend first reading the Package overview vignette.
Usage
Simple minimum set problem
In the prioritizr R package, all conservation planning
problems – including those which contain multiple management zones or
actions – are initialized using the problem function. To
refresh our memory on how we can construct problems, let us quickly
construct a simple conservation planning problem. This problem will use
the simulated built-in planning unit and feature data distributed with
the package. It will have a minimum set objective, targets which require
that solutions secure to 10% of the habitat in the study area for each
feature, and binary decision variables indicating that planning units
are selected or not selected for protection.
# load packages
library(prioritizr)
library(terra)## terra 1.9.27##
## Attaching package: 'terra'## The following object is masked from 'package:prioritizr':
##
## rescale## The following objects are masked from 'package:testthat':
##
## compare, describe
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
# create targets for each of the five features
t1 <- rep(0.1, 5)
# build single-zone problem
p1 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_relative_targets(t1) %>%
add_binary_decisions()
# print problem
print(p1)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•features: "feature_1", "feature_2", "feature_3", … (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (90 total)
## │ ├•costs: continuous values (between 190.1328 and 215.8638)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties: none specified
## │├•features:
## ││├•targets: relative targets (all equal to 0.1)
## ││└•weights: none specified
## │├•constraints: none specified
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s1 <- solve(p1)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 5 rows, 90 columns and 450 nonzeros (Min)
## Model fingerprint: 0x4bb5d283
## Model has 90 linear objective coefficients
## Variable types: 0 continuous, 90 integer (90 binary)
## Coefficient statistics:
## Matrix range [2e-01, 9e-01]
## Objective range [2e+02, 2e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [3e+00, 8e+00]
##
## Found heuristic solution: objective 2337.9617767
## Presolve time: 0.00s
## Presolved: 5 rows, 90 columns, 450 nonzeros
## Variable types: 0 continuous, 90 integer (90 binary)
## Root relaxation presolved: 5 rows, 90 columns, 450 nonzeros
##
##
## Root relaxation: objective 1.931582e+03, 12 iterations, 0.00 seconds (0.00 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 1931.58191 0 4 2337.96178 1931.58191 17.4% - 0s
## H 0 0 2207.8530121 1931.58191 12.5% - 0s
## H 0 0 1987.3985291 1931.58191 2.81% - 0s
##
## Explored 1 nodes (12 simplex iterations) in 0.00 seconds (0.00 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 3: 1987.4 2207.85 2337.96
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 1.987398529053e+03, best bound 1.931581907658e+03, gap 2.8085%
# calculate feature representation
r1 <- eval_feature_representation_summary(p1, s1)
print(r1)## # A tibble: 5 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall feature_1 83.3 8.91 0.107
## 2 overall feature_2 31.2 3.13 0.100
## 3 overall feature_3 72.0 7.34 0.102
## 4 overall feature_4 42.7 4.35 0.102
## 5 overall feature_5 56.7 6.01 0.106
# plot solution
plot(
s1, main = "solution",
xlim = c(-0.1, 1.1), ylim = c(-0.1, 1.1), axes = FALSE
)
Adding management zones
Now let us imagine that instead of having a single management zone (e.g., protected area), we have two management zones. Similar to the example above, we require a solution that secures 10 % of the habitat in the study area for each feature in the first management zone. But we also require a solution that secures 5 % of the habitat in the study area for each feature in the second management zone. Each planning unit must be allocated to either zone or not selected for management at all. In this example, each planning unit costs the same when it is allocated to either of the two zones. We can formulate and solve this problem using the following code.
# create a matrix with the targets
# here each column corresponds to a different zone,
# each row corresponds to a different feature, and
# each cell value corresponds to the target
t2 <- matrix(NA, ncol = 2, nrow = 5)
t2[, 1] <- 0.1
t2[, 2] <- 0.05
# print targets
print(t2)## [,1] [,2]
## [1,] 0.1 0.05
## [2,] 0.1 0.05
## [3,] 0.1 0.05
## [4,] 0.1 0.05
## [5,] 0.1 0.05
# create a zones object that contains the amount of each feature
# in each planning unit when it is allocated to each zone
# since our zones pertain to the same habitat data, we will
# specify the same habitat data for each zone
z2 <- zones("zone 1" = sim_features, "zone 2" = sim_features)
# print zones
print(z2)## A zones object <ZonesSpatRaster/Zones>
## • zones: "zone 1" and "zone 2" (2 total)
## • features: "1", "2", "3", "4", and "5" (5 total)
# create a multi-layer raster with the planning unit data
## since our planning unit costs are the same for each zone,
## we will create a raster with two replicates of the cost data
pu2 <- c(sim_pu_raster, sim_pu_raster)
# print planning units
print(pu2)## class : SpatRaster
## size : 10, 10, 2 (nrow, ncol, nlyr)
## resolution : 0.1, 0.1 (x, y)
## extent : 0, 1, 0, 1 (xmin, xmax, ymin, ymax)
## coord. ref. : WGS 84 / Pseudo-Mercator (EPSG:3857)
## sources : sim_pu_raster.tif
## names : layer, layer
## min values : 190.132751, 190.132751
## max values : 215.863846, 215.863846
# build two-zone problem
p2 <-
problem(pu2, z2) %>%
add_min_set_objective() %>%
add_relative_targets(t2) %>%
add_binary_decisions()
# print problem
print(p2)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•zones: "zone 1" and "zone 2" (2 total)
## │├•features: "1", "2", "3", "4", and "5" (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (90 total)
## │ ├•costs: continuous values (between 190.1328 and 215.8638)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties: none specified
## │├•features:
## ││├•targets: relative targets (between 0.05 and 0.1)
## ││└•weights: none specified
## │├•constraints: none specified
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s2 <- solve(p2)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 100 rows, 180 columns and 1080 nonzeros (Min)
## Model fingerprint: 0x5c140ae3
## Model has 180 linear objective coefficients
## Variable types: 0 continuous, 180 integer (180 binary)
## Coefficient statistics:
## Matrix range [2e-01, 1e+00]
## Objective range [2e+02, 2e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [1e+00, 8e+00]
##
## Found heuristic solution: objective 3568.4931335
## Presolve time: 0.00s
## Presolved: 100 rows, 180 columns, 1080 nonzeros
## Variable types: 0 continuous, 180 integer (180 binary)
## Root relaxation presolved: 100 rows, 180 columns, 1080 nonzeros
##
##
## Root relaxation: objective 2.911333e+03, 75 iterations, 0.00 seconds (0.00 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 2911.33336 0 10 3568.49313 2911.33336 18.4% - 0s
## H 0 0 3222.4640198 2911.33336 9.66% - 0s
##
## Explored 1 nodes (79 simplex iterations) in 0.00 seconds (0.00 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 2: 3222.46 3568.49
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 3.222464019775e+03, best bound 2.911333356299e+03, gap 9.6551%
# calculate feature representation
r2 <- eval_feature_representation_summary(p2, s2)
print(r2)## # A tibble: 15 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall 1 167. 13.9 0.0835
## 2 overall 2 62.4 5.31 0.0850
## 3 overall 3 144. 11.5 0.0800
## 4 overall 4 85.3 7.20 0.0844
## 5 overall 5 113. 9.38 0.0827
## 6 zone 1 1 83.3 8.68 0.104
## 7 zone 1 2 31.2 3.29 0.105
## 8 zone 1 3 72.0 7.30 0.101
## 9 zone 1 4 42.7 4.47 0.105
## 10 zone 1 5 56.7 5.80 0.102
## 11 zone 2 1 83.3 5.23 0.0628
## 12 zone 2 2 31.2 2.02 0.0646
## 13 zone 2 3 72.0 4.21 0.0586
## 14 zone 2 4 42.7 2.73 0.0640
## 15 zone 2 5 56.7 3.58 0.0631
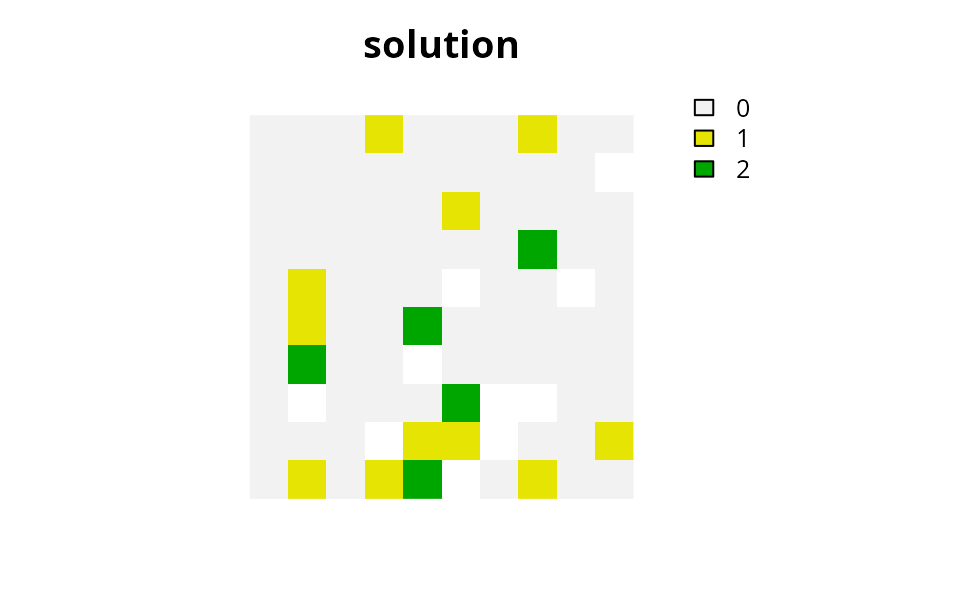
# plot solution
# here we use the category layer function to generate raster showing the zone
# that each planning unit was allocated. Specifically, pixels with the
# value 1 (green) are allocated to "zone 1" and pixels with the value 2 (yellow)
# are allocated to "zone 2". Units depicted in purple are not allocated
# to any zone.
plot(
category_layer(s2), main = "solution",
xlim = c(-0.1, 1.1), ylim = c(-0.1, 1.1), axes = FALSE
)
Multiple zones with varying costs
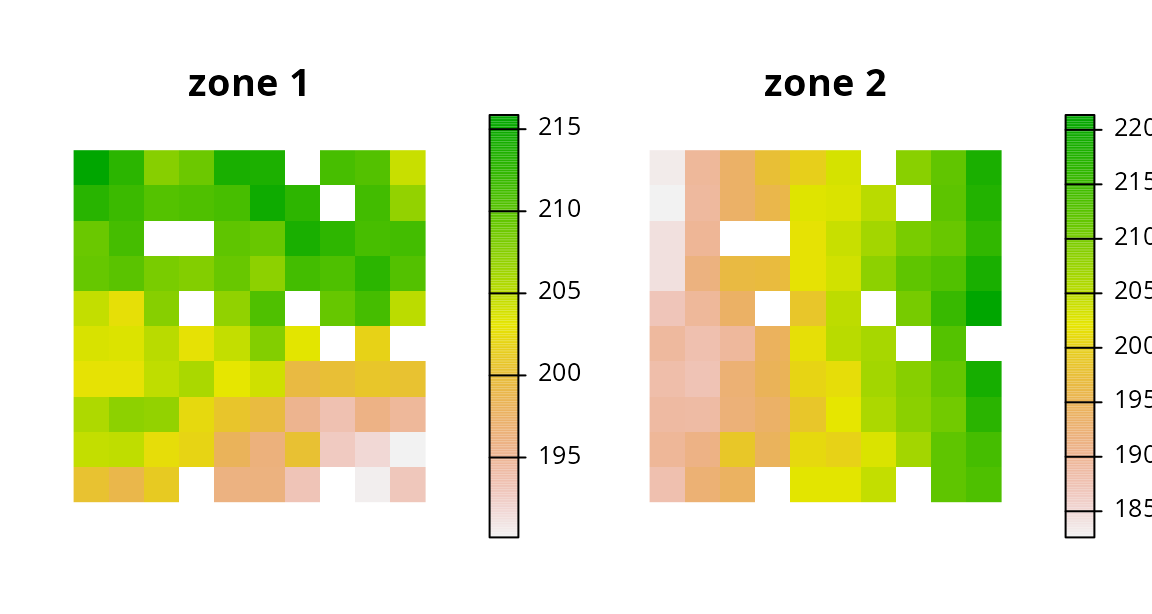
Real-world problems often have different costs for managing planning units under different zones. These problems also tend to have different expected amounts of each feature when planning units are managed differently. So let us consider a slightly more complex example. Similar to before we will have two management zones. But this time, the cost of managing each planning unit is different depending on which management zone it is assigned to in the solution. Furthermore, when we assign a planning unit to the second zone, we only expect to end up with half of the habitat we would get if we managed the unit in the first zone (e.g., because the second zone is a partial-take zone and the first zone is a no-take zone). We will use the same target data as in the previous example.
# create new planning unit and cost data
pu3 <- get_sim_zones_pu_raster()[[1:2]]
# plot cost data
plot(
pu3, main = c("zone 1", "zone 2"),
xlim = c(-0.1, 1.1), ylim = c(-0.1, 1.1), axes = FALSE
)
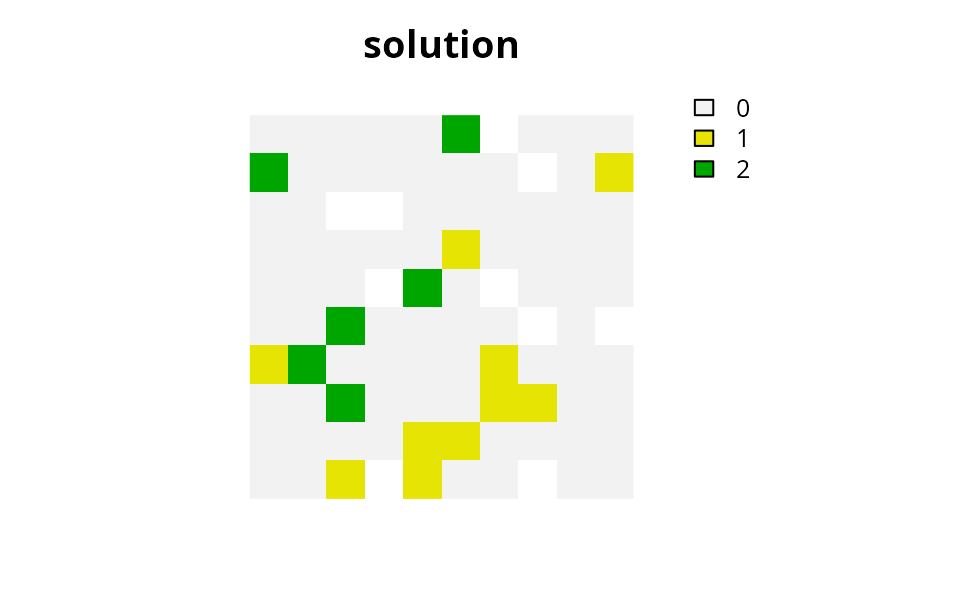
# create problem
p3 <-
problem(pu3, zones(sim_features, sim_features * 0.5)) %>%
add_min_set_objective() %>%
add_relative_targets(t2) %>%
add_binary_decisions()
# print problem
print(p3)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•zones: "1" and "2" (2 total)
## │├•features: "1", "2", "3", "4", and "5" (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (90 total)
## │ ├•costs: continuous values (between 182.6017 and 221.363)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties: none specified
## │├•features:
## ││├•targets: relative targets (between 0.05 and 0.1)
## ││└•weights: none specified
## │├•constraints: none specified
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s3 <- solve(p3)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 100 rows, 180 columns and 1080 nonzeros (Min)
## Model fingerprint: 0xdfa75166
## Model has 180 linear objective coefficients
## Variable types: 0 continuous, 180 integer (180 binary)
## Coefficient statistics:
## Matrix range [1e-01, 1e+00]
## Objective range [2e+02, 2e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [8e-01, 8e+00]
##
## Found heuristic solution: objective 3667.7708740
## Presolve time: 0.00s
## Presolved: 100 rows, 180 columns, 1080 nonzeros
## Variable types: 0 continuous, 180 integer (180 binary)
## Root relaxation presolved: 100 rows, 180 columns, 1080 nonzeros
##
##
## Root relaxation: objective 2.884872e+03, 38 iterations, 0.00 seconds (0.00 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 2884.87201 0 8 3667.77087 2884.87201 21.3% - 0s
## H 0 0 3199.6670685 2884.87201 9.84% - 0s
##
## Explored 1 nodes (38 simplex iterations) in 0.00 seconds (0.00 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 2: 3199.67 3667.77
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 3.199667068481e+03, best bound 2.884872007846e+03, gap 9.8384%
# calculate feature representation
r3 <- eval_feature_representation_summary(p3, s3)
print(r3)## # A tibble: 15 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall 1 125. 11.3 0.0902
## 2 overall 2 46.8 4.30 0.0917
## 3 overall 3 108. 9.46 0.0877
## 4 overall 4 64.0 5.90 0.0922
## 5 overall 5 85.1 7.56 0.0889
## 6 1 1 83.3 8.69 0.104
## 7 1 2 31.2 3.31 0.106
## 8 1 3 72.0 7.30 0.102
## 9 1 4 42.7 4.53 0.106
## 10 1 5 56.7 5.82 0.103
## 11 2 1 41.6 2.59 0.0621
## 12 2 2 15.6 0.990 0.0634
## 13 2 3 36.0 2.16 0.0600
## 14 2 4 21.3 1.37 0.0642
## 15 2 5 28.4 1.74 0.0613
# plot solution
plot(
category_layer(s3), main = "solution",
xlim = c(-0.1, 1.1), ylim = c(-0.1, 1.1), axes = FALSE
)
Multiple zones with complex targets
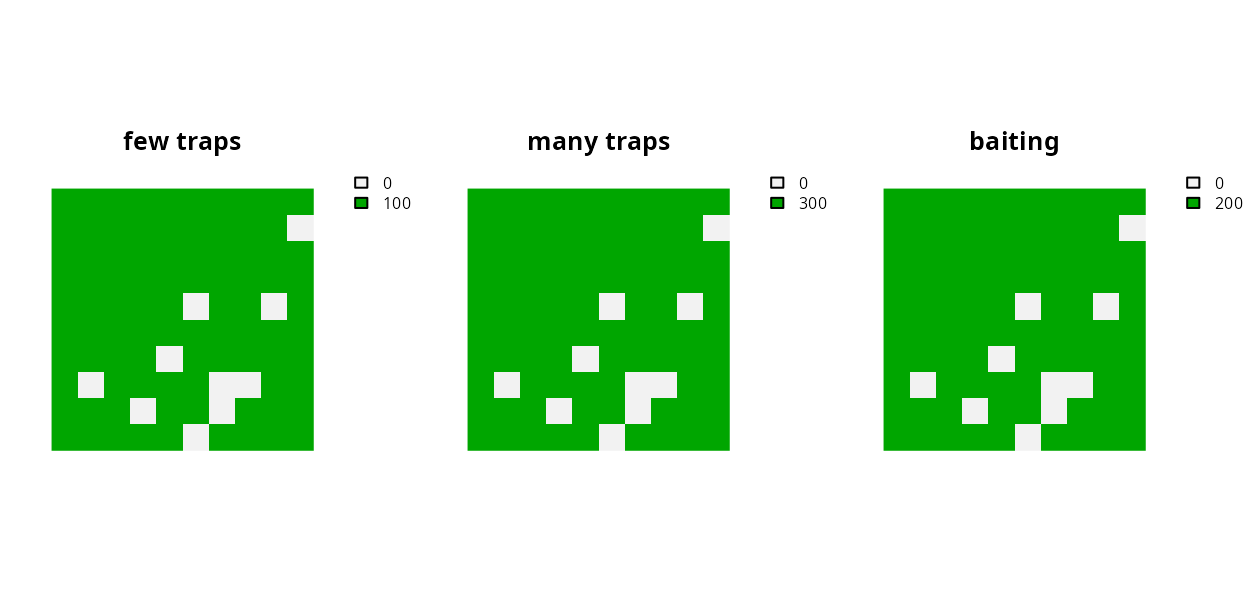
So far, we have dealt with problems where each feature has a target that pertains to a single zone. But sometimes we have targets that pertain to multiple zones. For example, what if we were in charge of managing pest control in a set of areas and we had three different pest control methods we could implement in any given planning unit. We could (i) set up a few traps in a given planning unit and make 10 % of the habitat in the unit pest-free, (ii) set up a lot of traps and make 50 % of the habitat in the unit pest-free, or (iii) drop baits over a given planning unit and make 80 % of the planning unit pest-free. Each of these different actions has a different cost, with a few low intensity trapping costing $100 per planning unit, a high intensity trapping costing $300, and baiting costing $200 (please note these costs aren’t meant to be realistic). After defining our management actions and costs, we require a solution that will yield 8 units of pest free habitat per feature. It’s important to note that unlike the previous examples, here we don’t have targets for each feature in each zone, but rather our targets are for each feature and across multiple zones. In other words, we don’t really care which management actions we implement, we just want the set of actions that will meet our targets for minimum expenditure. We can formulate and solve this problem using the following code.
# create planning unit data with costs
pu4 <- c(
as.int(!is.na(sim_pu_raster)) * 100,
as.int(!is.na(sim_pu_raster)) * 300,
as.int(!is.na(sim_pu_raster)) * 200
)
names(pu4) <- c("few traps", "many traps", "baiting")
# plot planning unit data
plot(
pu4, nr = 1,
xlim = c(-0.1, 1.1), ylim = c(-0.1, 1.1), axes = FALSE
)
# create targets
t4 <- tibble(
feature = names(sim_features),
zone = list(names(pu4))[rep(1, 5)],
target = rep(8, 5),
type = rep("absolute", 5)
)
# print targets
print(t4)## # A tibble: 5 × 4
## feature zone target type
## <chr> <list> <dbl> <chr>
## 1 feature_1 <chr [3]> 8 absolute
## 2 feature_2 <chr [3]> 8 absolute
## 3 feature_3 <chr [3]> 8 absolute
## 4 feature_4 <chr [3]> 8 absolute
## 5 feature_5 <chr [3]> 8 absolute
# create problem
p4 <-
problem(
pu4,
zones(
sim_features * 0.1,
sim_features * 0.5,
sim_features * 0.8,
zone_names = names(pu4),
feature_names = names(sim_features)
)
) %>%
add_min_set_objective() %>%
add_manual_targets(t4) %>%
add_binary_decisions()
# print problem
print(p4)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•zones: "few traps", "many traps", and "baiting" (3 total)
## │├•features: "feature_1", "feature_2", "feature_3", … (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (100 total)
## │ ├•costs: continuous values (between 0 and 300)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties: none specified
## │├•features:
## ││├•targets: absolute targets (all equal to 8)
## ││└•weights: none specified
## │├•constraints: none specified
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s4 <- solve(p4)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 105 rows, 300 columns and 1800 nonzeros (Min)
## Model fingerprint: 0xba527df5
## Model has 270 linear objective coefficients
## Variable types: 0 continuous, 300 integer (300 binary)
## Coefficient statistics:
## Matrix range [2e-02, 1e+00]
## Objective range [1e+02, 3e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [1e+00, 8e+00]
##
## Found heuristic solution: objective 9400.0000000
## Presolve removed 14 rows and 120 columns
## Presolve time: 0.00s
## Presolved: 91 rows, 180 columns, 360 nonzeros
## Found heuristic solution: objective 4800.0000000
## Variable types: 0 continuous, 180 integer (180 binary)
## Found heuristic solution: objective 4700.0000000
## Root relaxation presolved: 91 rows, 180 columns, 360 nonzeros
##
##
## Root relaxation: objective 3.663237e+03, 1 iterations, 0.00 seconds (0.00 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 3663.23656 0 1 4700.00000 3663.23656 22.1% - 0s
## H 0 0 3800.0000000 3663.23656 3.60% - 0s
##
## Explored 1 nodes (1 simplex iterations) in 0.00 seconds (0.00 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 4: 3800 4700 4800 9400
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 3.800000000000e+03, best bound 3.700000000000e+03, gap 2.6316%
# calculate feature representation
r4 <- eval_feature_representation_summary(p4, s4)
print(r4)## # A tibble: 20 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall feature_1 117. 18.3 0.157
## 2 overall feature_2 43.7 8.19 0.187
## 3 overall feature_3 101. 15.2 0.151
## 4 overall feature_4 59.7 11.6 0.194
## 5 overall feature_5 79.4 12.7 0.161
## 6 few traps feature_1 8.33 0 0
## 7 few traps feature_2 3.12 0 0
## 8 few traps feature_3 7.20 0 0
## 9 few traps feature_4 4.27 0 0
## 10 few traps feature_5 5.67 0 0
## 11 many traps feature_1 41.6 0 0
## 12 many traps feature_2 15.6 0 0
## 13 many traps feature_3 36.0 0 0
## 14 many traps feature_4 21.3 0 0
## 15 many traps feature_5 28.4 0 0
## 16 baiting feature_1 66.6 18.3 0.275
## 17 baiting feature_2 25.0 8.19 0.328
## 18 baiting feature_3 57.6 15.2 0.264
## 19 baiting feature_4 34.1 11.6 0.340
## 20 baiting feature_5 45.4 12.7 0.281
# plot solution
plot(category_layer(s4), main = "solution", axes = FALSE)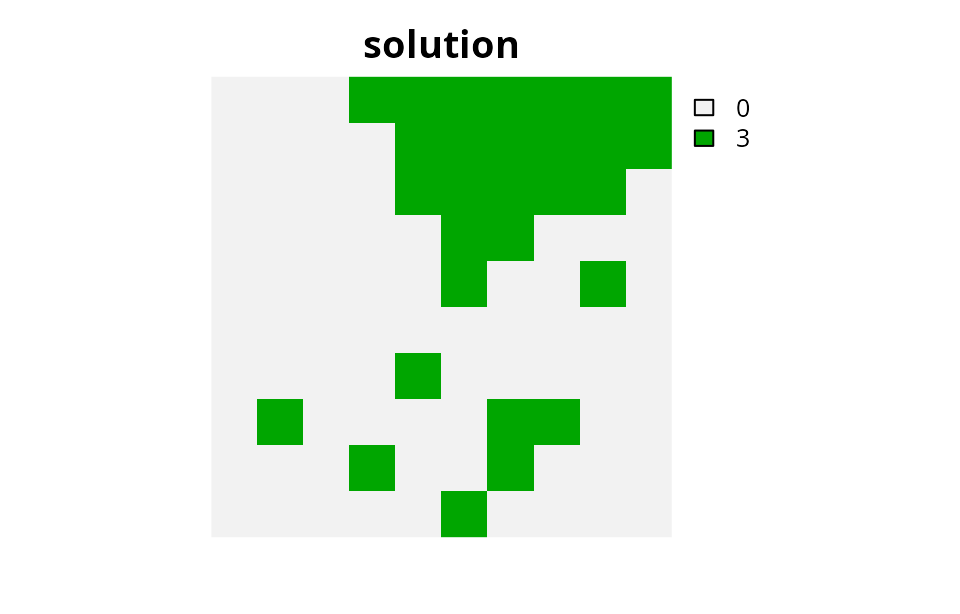
Multiple zones with extra constraints
So it looks like baiting is the way to go! Except that we might recall that we can’t use baits in most of the planning units because they contain native species that are susceptible to baits. So now we need to specify which of our planning units cannot be assigned to the third zone (baiting) to obtain a more useful solution.
# create data.frame to specify that we cannot bait in the first 80 units
l5 <- tibble(pu = seq(1, 80), zone = "baiting", status = 0)
# preview locked data
head(l5)## # A tibble: 6 × 3
## pu zone status
## <int> <chr> <dbl>
## 1 1 baiting 0
## 2 2 baiting 0
## 3 3 baiting 0
## 4 4 baiting 0
## 5 5 baiting 0
## 6 6 baiting 0
# create problem
p5 <-
problem(
pu4,
zones(
sim_features * 0.1,
sim_features * 0.5,
sim_features * 0.8,
zone_names = names(pu4),
feature_names = names(sim_features)
)
) %>%
add_min_set_objective() %>%
add_manual_targets(t4) %>%
add_manual_locked_constraints(l5) %>%
add_binary_decisions()
# print problem
print(p5)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•zones: "few traps", "many traps", and "baiting" (3 total)
## │├•features: "feature_1", "feature_2", "feature_3", … (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (100 total)
## │ ├•costs: continuous values (between 0 and 300)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties: none specified
## │├•features:
## ││├•targets: absolute targets (all equal to 8)
## ││└•weights: none specified
## │├•constraints:
## ││└•1: manual locked constraints (80 planning units)
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s5 <- solve(p5)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 105 rows, 300 columns and 1800 nonzeros (Min)
## Model fingerprint: 0x0d87ce25
## Model has 270 linear objective coefficients
## Variable types: 0 continuous, 300 integer (300 binary)
## Coefficient statistics:
## Matrix range [2e-02, 1e+00]
## Objective range [1e+02, 3e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [1e+00, 8e+00]
##
## Found heuristic solution: objective 13600.000000
## Presolve removed 14 rows and 120 columns
## Presolve time: 0.00s
## Presolved: 91 rows, 180 columns, 360 nonzeros
## Found heuristic solution: objective 12100.000000
## Variable types: 0 continuous, 180 integer (180 binary)
## Found heuristic solution: objective 10700.000000
## Root relaxation presolved: 91 rows, 180 columns, 360 nonzeros
##
##
## Root relaxation: objective 6.938068e+03, 1 iterations, 0.00 seconds (0.00 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 6938.06815 0 1 10700.0000 6938.06815 35.2% - 0s
## H 0 0 7000.0000000 6938.06815 0.88% - 0s
## 0 0 6938.06815 0 1 7000.00000 6938.06815 0.88% - 0s
##
## Explored 1 nodes (1 simplex iterations) in 0.00 seconds (0.00 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 4: 7000 10700 12100 13600
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 7.000000000000e+03, best bound 7.000000000000e+03, gap 0.0000%
# calculate feature representation
r5 <- eval_feature_representation_summary(p5, s5)
print(r5)## # A tibble: 20 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall feature_1 117. 21.8 0.187
## 2 overall feature_2 43.7 8.04 0.184
## 3 overall feature_3 101. 17.7 0.176
## 4 overall feature_4 59.7 10.9 0.182
## 5 overall feature_5 79.4 15.2 0.192
## 6 few traps feature_1 8.33 0 0
## 7 few traps feature_2 3.12 0 0
## 8 few traps feature_3 7.20 0 0
## 9 few traps feature_4 4.27 0 0
## 10 few traps feature_5 5.67 0 0
## 11 many traps feature_1 41.6 7.40 0.178
## 12 many traps feature_2 15.6 3.42 0.219
## 13 many traps feature_3 36.0 6.00 0.167
## 14 many traps feature_4 21.3 4.84 0.227
## 15 many traps feature_5 28.4 5.26 0.186
## 16 baiting feature_1 66.6 14.4 0.217
## 17 baiting feature_2 25.0 4.62 0.185
## 18 baiting feature_3 57.6 11.7 0.203
## 19 baiting feature_4 34.1 6.05 0.177
## 20 baiting feature_5 45.4 9.98 0.220
# plot solution
plot(category_layer(s5), main = "solution", axes = FALSE)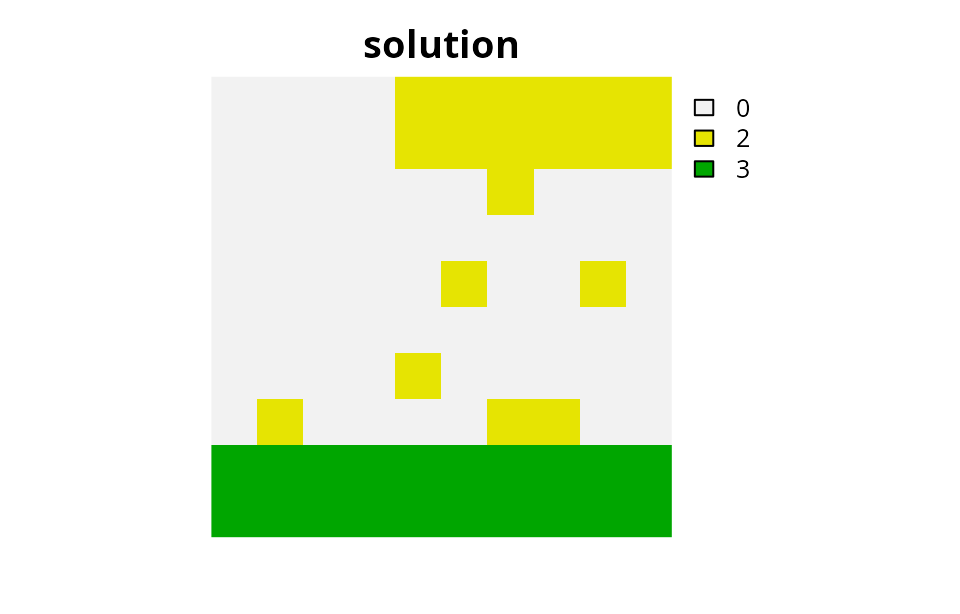
Multiple zones with fragmentation penalties
So now the best strategy seems to be a combination of high intensity trapping and baiting. But we can also see that this solution is fairly fragmented, so we can add penalties to cluster managed planning units together. Here we will add penalties that will cluster the planning units allocated to the two trapping zones together, and penalties that will cluster the planning units allocated to the baiting zone together. We will also set an overall penalty factor to 640 to strongly penalize fragmented solutions.
# create matrix that describes boundary penalties between planning units
# allocated to different zones
z6 <- diag(3)
z6[1, 2] <- 1
z6[2, 1] <- 1
colnames(z6) <- c("few traps", "many traps", "baiting")
rownames(z6) <- colnames(z6)
# print matrix
print(z6)## few traps many traps baiting
## few traps 1 1 0
## many traps 1 1 0
## baiting 0 0 1
# create problem
p6 <-
problem(
pu4,
zones(
sim_features * 0.1,
sim_features * 0.5,
sim_features * 0.8,
zone_names = names(pu4),
feature_names = names(sim_features)
)
) %>%
add_min_set_objective() %>%
add_manual_targets(t4) %>%
add_manual_locked_constraints(l5) %>%
add_boundary_penalties(penalty = 640, zones = z6) %>%
add_binary_decisions()
# print problem
print(p6)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•zones: "few traps", "many traps", and "baiting" (3 total)
## │├•features: "feature_1", "feature_2", "feature_3", … (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (100 total)
## │ ├•costs: continuous values (between 0 and 300)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties:
## ││└•1: boundary penalties (`penalty` = 640, …)
## │├•features:
## ││├•targets: absolute targets (all equal to 8)
## ││└•weights: none specified
## │├•constraints:
## ││└•1: manual locked constraints (80 planning units)
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s6 <- solve(p6)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 1905 rows, 1200 columns and 5400 nonzeros (Min)
## Model fingerprint: 0x4a95c3c3
## Model has 1200 linear objective coefficients
## Variable types: 900 continuous, 300 integer (300 binary)
## Coefficient statistics:
## Matrix range [2e-02, 1e+00]
## Objective range [3e+02, 9e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [1e+00, 8e+00]
##
## Found heuristic solution: objective 29840.000000
## Presolve removed 1028 rows and 232 columns
## Presolve time: 0.02s
## Presolved: 877 rows, 968 columns, 2712 nonzeros
## Variable types: 0 continuous, 968 integer (968 binary)
## Root relaxation presolved: 877 rows, 968 columns, 2712 nonzeros
##
##
## Root relaxation: objective 1.289388e+04, 662 iterations, 0.01 seconds (0.01 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 12893.8842 0 141 29840.0000 12893.8842 56.8% - 0s
## H 0 0 22960.000000 12893.8842 43.8% - 0s
## H 0 0 18060.000000 12893.8842 28.6% - 0s
## H 0 0 17180.000000 12893.8842 24.9% - 0s
## H 0 0 16880.000000 12893.8842 23.6% - 0s
## H 0 0 16580.000000 12893.8842 22.2% - 0s
## H 0 0 16500.000000 12893.8842 21.9% - 0s
## H 0 0 16400.000000 12893.8842 21.4% - 0s
## 0 0 13004.1024 0 207 16400.0000 13004.1024 20.7% - 0s
## 0 0 13082.4685 0 192 16400.0000 13082.4685 20.2% - 0s
## 0 0 13082.4685 0 192 16400.0000 13082.4685 20.2% - 0s
## 0 0 13082.4685 0 192 16400.0000 13082.4685 20.2% - 0s
## H 0 0 15520.000000 13082.4685 15.7% - 0s
## H 0 0 15200.000000 13082.4685 13.9% - 0s
## H 0 0 15120.000000 13082.4685 13.5% - 0s
## H 0 0 13780.000000 13082.4685 5.06% - 0s
##
## Cutting planes:
## Gomory: 3
##
## Explored 1 nodes (1169 simplex iterations) in 0.13 seconds (0.15 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 10: 13780 15120 15200 ... 18060
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 1.378000000000e+04, best bound 1.310000000000e+04, gap 4.9347%
# calculate feature representation
r6 <- eval_feature_representation_summary(p6, s6)
print(r6)## # A tibble: 20 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall feature_1 117. 22.4 0.192
## 2 overall feature_2 43.7 8.03 0.184
## 3 overall feature_3 101. 17.8 0.176
## 4 overall feature_4 59.7 11.7 0.196
## 5 overall feature_5 79.4 15.7 0.197
## 6 few traps feature_1 8.33 0 0
## 7 few traps feature_2 3.12 0 0
## 8 few traps feature_3 7.20 0 0
## 9 few traps feature_4 4.27 0 0
## 10 few traps feature_5 5.67 0 0
## 11 many traps feature_1 41.6 7.95 0.191
## 12 many traps feature_2 15.6 3.41 0.219
## 13 many traps feature_3 36.0 6.06 0.169
## 14 many traps feature_4 21.3 5.65 0.265
## 15 many traps feature_5 28.4 5.68 0.200
## 16 baiting feature_1 66.6 14.4 0.217
## 17 baiting feature_2 25.0 4.62 0.185
## 18 baiting feature_3 57.6 11.7 0.203
## 19 baiting feature_4 34.1 6.05 0.177
## 20 baiting feature_5 45.4 9.98 0.220
# plot solution
plot(category_layer(s6), main = "solution", axes = FALSE)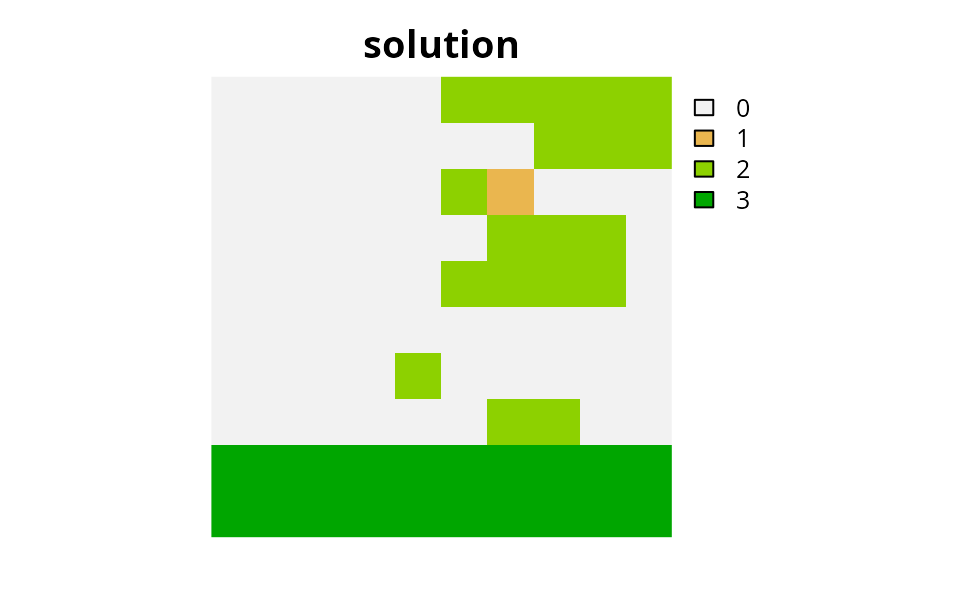
Finally, it appears we might have a viable solution for this made-up conservation problem.
Multiple zones with fragmentation penalties and mandatory allocations
Finally, we might be interested in conservation planning scenarios where every single planning unit must be allocated to a management zone. This is often the case when developing land-use plans where every single planning unit needs to be allocated to a specific management zone. Though it makes less sense here, let’s see what happens to the solution if we needed to do at least one form of control in every single planning unit.
# create matrix that describe boundary penalties between planning units
# allocated to different zones
p7 <-
problem(
pu4,
zones(
sim_features * 0.1,
sim_features * 0.5,
sim_features * 0.8,
zone_names = names(pu4),
feature_names = names(sim_features)
)
) %>%
add_min_set_objective() %>%
add_manual_targets(t4) %>%
add_mandatory_allocation_constraints() %>%
add_manual_locked_constraints(l5) %>%
add_boundary_penalties(penalty = 640, zones = z6) %>%
add_binary_decisions()
# print problem
print(p7)## A conservation problem (<ConservationProblem>)
## ├•data
## │├•zones: "few traps", "many traps", and "baiting" (3 total)
## │├•features: "feature_1", "feature_2", "feature_3", … (5 total)
## │└•planning units:
## │ ├•data: <SpatRaster> (100 total)
## │ ├•costs: continuous values (between 0 and 300)
## │ ├•extent: 0, 0, 1, 1 (xmin, ymin, xmax, ymax)
## │ └•CRS: WGS 84 / Pseudo-Mercator (projected)
## ├•formulation
## │├•objective: minimum set objective
## │├•penalties:
## ││└•1: boundary penalties (`penalty` = 640, …)
## │├•features:
## ││├•targets: absolute targets (all equal to 8)
## ││└•weights: none specified
## │├•constraints:
## ││├•1: mandatory allocation constraints
## ││└•2: manual locked constraints (80 planning units)
## │└•decisions: binary decision
## └•optimization
## ├•portfolio: single portfolio
## └•solver: gurobi solver (`gap` = 0.1, `time_limit` = 2147483647, …)
## # ℹ Use `summary(...)` to see further details.
# solve problem
s7 <- solve(p7)## ## ── Optimization ────────────────────────────────────────────────────────────────## Set parameter Username
## Set parameter LicenseID to value 2806834
## Set parameter TimeLimit to value 2147483647
## Set parameter MIPGap to value 0.1
## Set parameter Presolve to value 2
## Set parameter Threads to value 1
## Academic license - for non-commercial use only - expires 2027-04-14
## Warning: Gurobi version mismatch between R 13.0.1 and C library 13.0.2
## Gurobi Optimizer version 13.0.2 build v13.0.2rc1 (linux64 - "Ubuntu 24.04.2 LTS")
##
## CPU model: 11th Gen Intel(R) Core(TM) i7-1185G7 @ 3.00GHz, instruction set [SSE2|AVX|AVX2|AVX512]
## Thread count: 4 physical cores, 8 logical processors, using up to 1 threads
##
## Non-default parameters:
## TimeLimit 2147483647
## MIPGap 0.1
## Presolve 2
## Threads 1
##
## Optimize a model with 1905 rows, 1200 columns and 5400 nonzeros (Min)
## Model fingerprint: 0x5ecdaddd
## Model has 1200 linear objective coefficients
## Variable types: 900 continuous, 300 integer (300 binary)
## Coefficient statistics:
## Matrix range [2e-02, 1e+00]
## Objective range [3e+02, 9e+02]
## Bounds range [1e+00, 1e+00]
## RHS range [1e+00, 8e+00]
##
## Found heuristic solution: objective 24400.000000
## Presolve removed 1120 rows and 324 columns
## Presolve time: 0.02s
## Presolved: 785 rows, 876 columns, 2448 nonzeros
## Variable types: 0 continuous, 876 integer (876 binary)
## Root relaxation presolved: 785 rows, 876 columns, 2448 nonzeros
##
##
## Root relaxation: objective 1.695102e+04, 309 iterations, 0.00 seconds (0.00 work units)
##
## Nodes | Current Node | Objective Bounds | Work
## Expl Unexpl | Obj Depth IntInf | Incumbent BestBd Gap | It/Node Time
##
## 0 0 16951.0158 0 95 24400.0000 16951.0158 30.5% - 0s
## H 0 0 19100.000000 16951.0158 11.3% - 0s
## H 0 0 19020.000000 16951.0158 10.9% - 0s
## 0 0 17029.0334 0 102 19020.0000 17029.0334 10.5% - 0s
## H 0 0 18700.000000 17029.0334 8.94% - 0s
##
## Cutting planes:
## Gomory: 1
##
## Explored 1 nodes (447 simplex iterations) in 0.03 seconds (0.04 work units)
## Thread count was 1 (of 8 available processors)
##
## Solution count 4: 18700 19020 19100 24400
##
## Optimal solution found (tolerance 1.00e-01)
## Best objective 1.870000000000e+04, best bound 1.704000000000e+04, gap 8.8770%
# calculate feature representation
r7 <- eval_feature_representation_summary(p7, s7)
print(r7)## # A tibble: 20 × 5
## summary feature total_amount absolute_held relative_held
## <chr> <chr> <dbl> <dbl> <dbl>
## 1 overall feature_1 117. 25.7 0.221
## 2 overall feature_2 43.7 9.25 0.212
## 3 overall feature_3 101. 21.4 0.212
## 4 overall feature_4 59.7 12.5 0.210
## 5 overall feature_5 79.4 17.7 0.223
## 6 few traps feature_1 8.33 5.33 0.640
## 7 few traps feature_2 3.12 2.02 0.648
## 8 few traps feature_3 7.20 4.74 0.659
## 9 few traps feature_4 4.27 2.76 0.647
## 10 few traps feature_5 5.67 3.59 0.633
## 11 many traps feature_1 41.6 5.95 0.143
## 12 many traps feature_2 15.6 2.61 0.167
## 13 many traps feature_3 36.0 4.94 0.137
## 14 many traps feature_4 21.3 3.74 0.175
## 15 many traps feature_5 28.4 4.16 0.147
## 16 baiting feature_1 66.6 14.4 0.217
## 17 baiting feature_2 25.0 4.62 0.185
## 18 baiting feature_3 57.6 11.7 0.203
## 19 baiting feature_4 34.1 6.05 0.177
## 20 baiting feature_5 45.4 9.98 0.220
# plot solution
plot(category_layer(s7), main = "solution", axes = FALSE)
Conclusion
Hopefully, this vignette has provided an informative introduction to building and solving problems with multiple zones. Although we have examined only a few different functions here, almost every single function for modifying conservation planning problems is compatible with problems that contain zones. It’s worth noting that working with multiple zones is a lot trickier than working with a single zone, so we would recommend playing around with the code in the Examples sections of the package documentation to help understand how functions work when applied to multiple zones.