Conservation planning problems involve making decisions on how different planning units will be managed. These decisions might involve turning an entire planning unit into a protected area, turning part of a planning unit into a protected area, or allocating a planning unit to a specific management zone. If no decision is explicitly added to a problem, then binary decisions will be used by default.
Details
The following functions can be used to add a decision type to a
conservation planning problem(). Note that if multiple
of these functions are added to a problem(), then only the last
function added will be used.
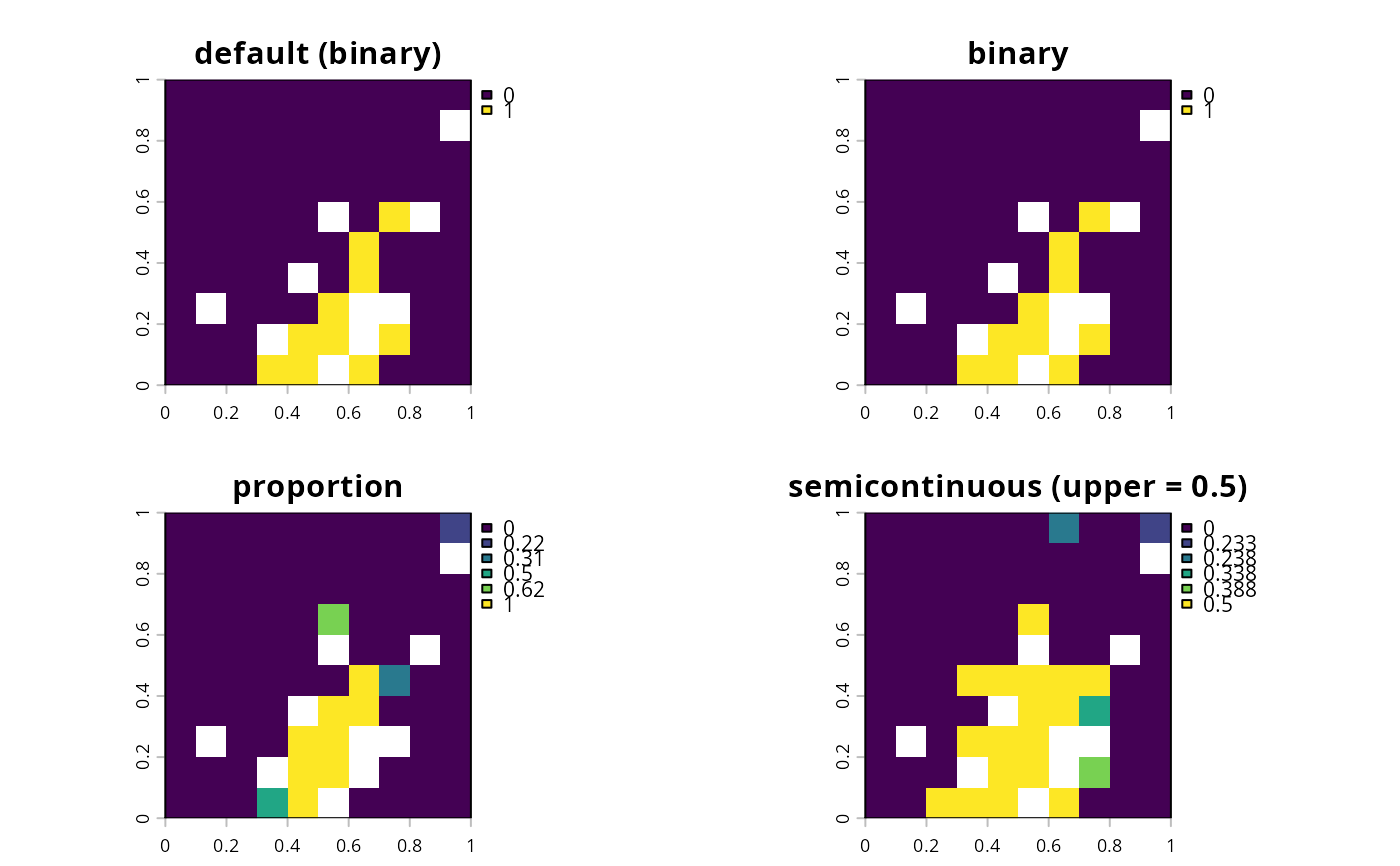
add_binary_decisions()Add a binary decision to a conservation planning problem. This is the classic decision of either prioritizing or not prioritizing a planning unit. Typically, this decision has the assumed action of buying the planning unit to include in a protected area network. If no decision is added to a problem object then this decision class will be used by default.
add_proportion_decisions()Add a proportion decision to a conservation planning problem. This is a relaxed decision where a part of a planning unit can be prioritized, as opposed to the default of the entire planning unit. Typically, this decision has the assumed action of buying a fraction of a planning unit to include in a protected area network.
add_semicontinuous_decisions()Add a semi-continuous decision to a conservation planning problem. This decision is similar to
add_proportion_decisionexcept that it has an upper bound parameter. By default, the decision can range from prioritizing none (0%) to all (100%) of a planning unit. However, a upper bound can be specified to ensure that at most only a fraction (e.g., 80%) of a planning unit can be preserved. This type of decision may be useful when it is not practical to conserve the entire area encompassed by any single planning unit.
See also
Other overviews:
approaches,
constraints,
importance,
objectives,
penalties,
portfolios,
solvers,
summaries,
targets
Examples
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
# create basic problem and using the default decision types (binary)
p1 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_relative_targets(0.1) %>%
add_default_solver(verbose = FALSE)
# create problem with manually specified binary decisions
p2 <- p1 %>% add_binary_decisions()
# create problem with proportion decisions
p3 <- p1 %>% add_proportion_decisions()
# create problem with semicontinuous decisions
p4 <- p1 %>% add_semicontinuous_decisions(upper_limit = 0.5)
# solve problem
s <- c(solve(p1), solve(p2), solve(p3), solve(p4))
names(s) <- c(
"default (binary)", "binary", "proportion", "semicontinuous (upper = 0.5)"
)
# plot solutions
plot(s)