A constraint can be added to a conservation planning problem to ensure that solutions exhibit a specific characteristic.
Details
Constraints are used to impose rules to ensure that solutions exhibit (or do not exhibit) a particular characteristic. For instance, they can be used to lock in or lock out certain planning units from the solution, such as protected areas or degraded land (respectively). Additionally, similar to the penalties functions, some of the constraint functions can be used to increase connectivity in a solution. The key difference between a penalty and a constraint, however, is that constraints work by forbidding solutions that do not exhibit a specific characteristic, whereas penalty functions work by than penalizing solutions which do not meet a specific characteristic.
The following functions can be used to add constraints to a
conservation planning problem().
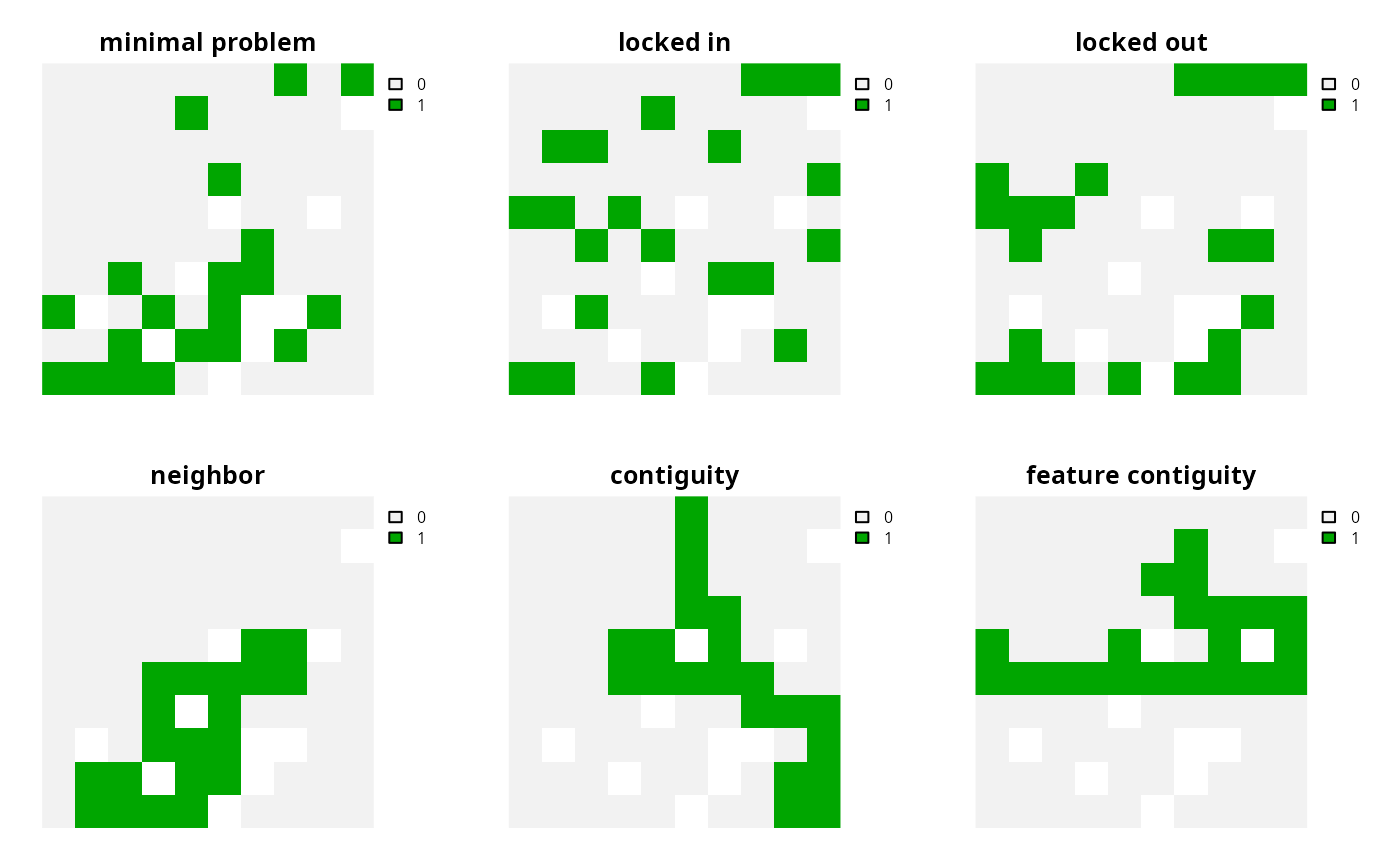
add_locked_in_constraints()Add constraints to ensure that certain planning units are selected in the solution.
add_locked_out_constraints()Add constraints to ensure that certain planning units are not selected in the solution.
add_neighbor_constraints()Add constraints to ensure that all selected planning units have at least a certain number of neighbors. These constraints may be especially useful for reducing spatial fragmentation in large-scale planning problems or when using open source solvers.
add_contiguity_constraints()Add constraints to a ensure that all selected planning units are spatially connected to each other and form a single contiguous unit.
add_feature_contiguity_constraints()Add constraints to ensure that each feature is represented in a contiguous unit of dispersible habitat. These constraints are a more advanced version of those implemented in the
add_contiguity_constraints()function, because they ensure that each feature is represented in a contiguous unit and not that the entire solution should form a contiguous unit.add_linear_constraints()Add constraints to ensure that all selected planning units meet certain criteria. For example, they can be used to add multiple budgets, or limit the number of planning units selected in different administrative areas within a study region (e.g., different countries).
add_cost_constraints()Add constraints to ensure that the cost of selected planning units meets certain criteria. For example, they can be used to ensure that the solution has a total cost that exceeds a particular threshold. These constraints would typically be used with multi-objective optimization.
add_mandatory_allocation_constraints()Add constraints to ensure that every planning unit is allocated to a management zone in the solution. Note that this function can only be used with problems that contain multiple zones.
See also
Other overviews:
approaches,
decisions,
importance,
objectives,
penalties,
portfolios,
solvers,
summaries,
targets
Examples
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
sim_locked_in_raster <- get_sim_locked_in_raster()
sim_locked_out_raster <- get_sim_locked_in_raster()
# create minimal problem with only targets and no additional constraints
p1 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_relative_targets(0.2) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# create problem with locked in constraints
p2 <- p1 %>% add_locked_in_constraints(sim_locked_in_raster)
# create problem with locked in constraints
p3 <- p1 %>% add_locked_out_constraints(sim_locked_out_raster)
# create problem with neighbor constraints
p4 <- p1 %>% add_neighbor_constraints(2)
# create problem with contiguity constraints
p5 <- p1 %>% add_contiguity_constraints()
# create problem with feature contiguity constraints
p6 <- p1 %>% add_feature_contiguity_constraints()
# create problem with linear constraints to ensure that,
# at least, 5 planning units in the locked in raster are selected
p6 <- p1 %>% add_linear_constraints(5, ">=", sim_locked_in_raster)
# create problem with linear constraints to ensure that
# the total cost of solution is greater than or equal to 10
# (note that this example is fairly contrived, see the documentation for
# this function for a more realistic example)
p7 <- p1 %>% add_cost_constraints(10, ">=")
# solve problems
s <- terra::rast(lapply(list(p1, p2, p3, p4, p5, p6, p6, p7), solve))
names(s) <- c(
"minimal problem", "locked in", "locked out",
"neighbor", "contiguity", "feature contiguity",
"linear constraints", "cost constraints"
)
# plot solutions
plot(s, axes = FALSE, nr = 2)