Add constraints to a conservation planning problem to ensure that all selected planning units are spatially connected with each other and form a single contiguous unit.
Usage
# S4 method for class 'ConservationProblem,ANY,ANY'
add_contiguity_constraints(x, zones, data)
# S4 method for class 'ConservationProblem,ANY,data.frame'
add_contiguity_constraints(x, zones, data)
# S4 method for class 'ConservationProblem,ANY,matrix'
add_contiguity_constraints(x, zones, data)Arguments
- x
problem()object.- zones
matrixorMatrixobject describing the connection scheme for different zones. Each row and column corresponds to a different zone inx, and cell values must contain binarynumericvalues (i.e., one or zero) that indicate if connected planning units (as specified perdata) should be considered connected if they are allocated to different zones. The cell values along the diagonal of the matrix indicate if planning units should be subject to contiguity constraints when they are allocated to a given zone. Note thatzonesmust have symmetric values, and that if a row or column has a value of one then the diagonal element for that row or column must also have a value of one. Defaults to an identity matrix (i.e., a matrix with ones along the matrix diagonal and zeros elsewhere), so that planning units are only considered connected if they are both allocated to the same zone.- data
NULL,matrix,Matrix, ordata.frameobject showing which planning units are connected with each other. Defaults toNULLsuch thatdatais calculated automatically using theadjacency_matrix()function. See the Data format section for more information.
Value
An updated problem() object with the constraints added to it.
Details
This function uses connection data to identify solutions that form a single contiguous unit. It was inspired by the mathematical formulations detailed in Önal and Briers (2006).
Data format
The following formats can be used to specify data.
dataas aNULLvalueHere connection data are calculated automatically using the
adjacency_matrix()function. This is the default fordata. Note that the connection data must be manually specified using one of the other formats below when the planning unit data inxare not spatially referenced (e.g., indata.frameornumericformat).dataas amatrix/MatrixobjectHere rows and columns correspond to different planning units and cell values indicate if two planning units are connected or not. In particular, cell values should be binary
numericvalues (i.e., one or zero). Cells that occur along the matrix diagonal have no effect on the solution because each planning unit cannot be a connected with itself.dataas adata.frameobjectHere rows correspond to a pair of planning units and columns provide information about each pair of planning units. In particular,
datamust have the columns:"id1","id2", and"boundary". The"boundary"column should contain binarynumericvalues that indicate if the two planning units specified in the"id1"and"id2"columns are connected or not. This data can be used to describe symmetric or asymmetric relationships between planning units. By default, input data is assumed to be symmetric unless asymmetric data is specified (e.g., if data is present for planning units 2 and 3, then the same amount of connectivity is expected for planning units 3 and 2, unless connectivity data is also provided for planning units 3 and 2).
Notes
In early versions, this function was named as the
add_connected_constraints() function.
References
Önal H and Briers RA (2006) Optimal selection of a connected reserve network. Operations Research, 54: 379–388.
See also
Other functions for adding constraints:
add_cost_constraints(),
add_feature_contiguity_constraints(),
add_linear_constraints(),
add_locked_in_constraints(),
add_locked_out_constraints(),
add_mandatory_allocation_constraints(),
add_manual_bounded_constraints(),
add_manual_locked_constraints(),
add_neighbor_constraints()
Examples
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
sim_zones_pu_raster <- get_sim_zones_pu_raster()
sim_zones_features <- get_sim_zones_features()
# create minimal problem
p1 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_relative_targets(0.2) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
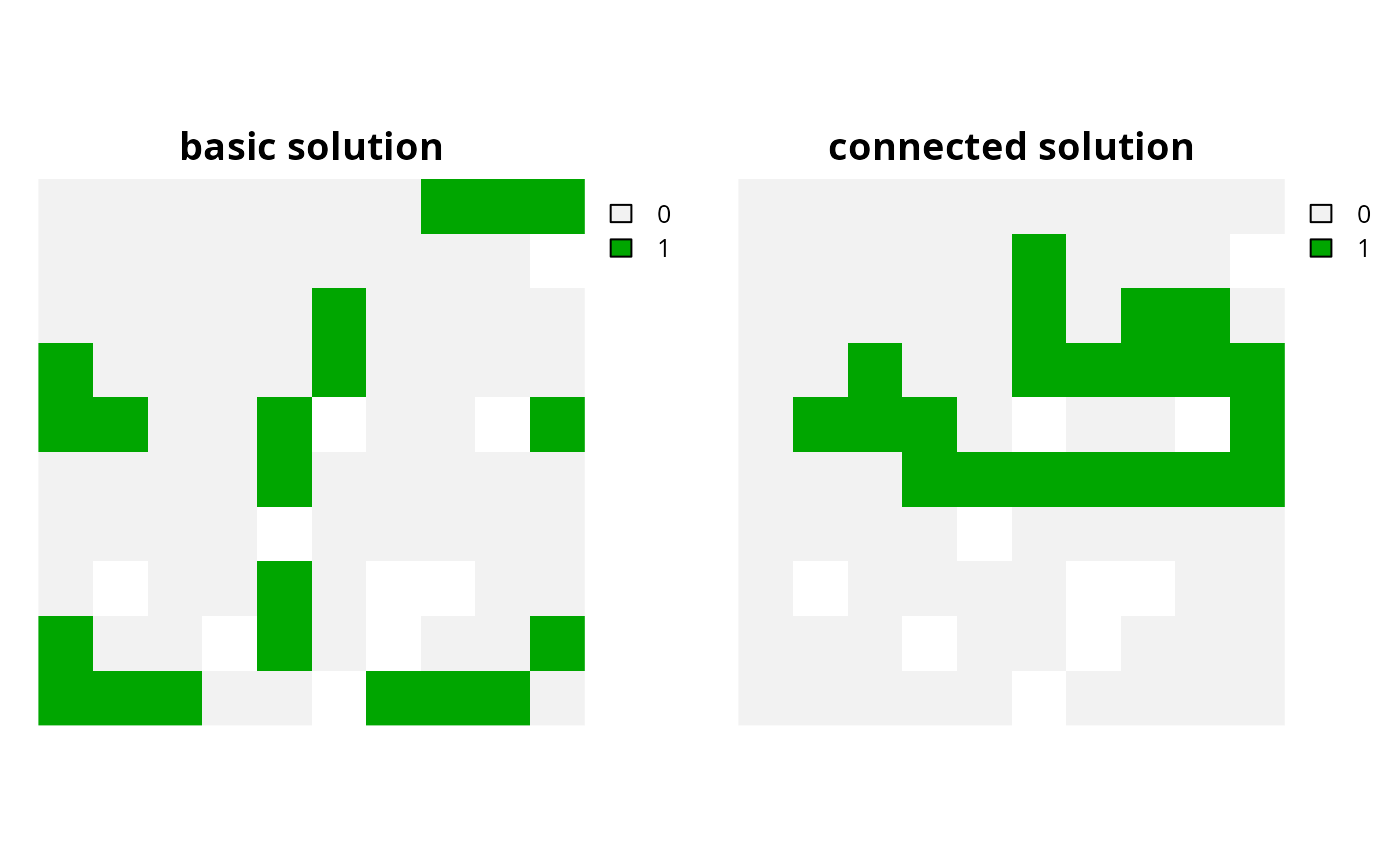
# create problem with added connected constraints
p2 <- p1 %>% add_contiguity_constraints()
# solve problems
s1 <- c(solve(p1), solve(p2))
names(s1) <- c("basic solution", "connected solution")
# plot solutions
plot(s1, axes = FALSE)
 # create minimal problem with multiple zones, and limit the solver to
# 30 seconds to obtain solutions in a feasible period of time
p3 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_relative_targets(matrix(0.2, ncol = 3, nrow = 5)) %>%
add_binary_decisions() %>%
add_default_solver(time_limit = 30, verbose = FALSE)
# create problem with added constraints to ensure that the planning units
# allocated to each zone form a separate contiguous unit
z4 <- diag(3)
print(z4)
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 1
p4 <- p3 %>% add_contiguity_constraints(z4)
# create problem with added constraints to ensure that the planning
# units allocated to each zone form a separate contiguous unit,
# except for planning units allocated to zone 3 which do not need
# form a single contiguous unit
z5 <- diag(3)
z5[3, 3] <- 0
print(z5)
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 0
p5 <- p3 %>% add_contiguity_constraints(z5)
# create problem with added constraints that ensure that the planning
# units allocated to zones 1 and 2 form a contiguous unit
z6 <- diag(3)
z6[1, 2] <- 1
z6[2, 1] <- 1
print(z6)
#> [,1] [,2] [,3]
#> [1,] 1 1 0
#> [2,] 1 1 0
#> [3,] 0 0 1
p6 <- p3 %>% add_contiguity_constraints(z6)
# solve problems
s2 <- lapply(list(p3, p4, p5, p6), solve)
s2 <- lapply(s2, category_layer)
s2 <- terra::rast(s2)
names(s2) <- c("basic solution", "p4", "p5", "p6")
# plot solutions
plot(s2, axes = FALSE)
# create minimal problem with multiple zones, and limit the solver to
# 30 seconds to obtain solutions in a feasible period of time
p3 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_relative_targets(matrix(0.2, ncol = 3, nrow = 5)) %>%
add_binary_decisions() %>%
add_default_solver(time_limit = 30, verbose = FALSE)
# create problem with added constraints to ensure that the planning units
# allocated to each zone form a separate contiguous unit
z4 <- diag(3)
print(z4)
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 1
p4 <- p3 %>% add_contiguity_constraints(z4)
# create problem with added constraints to ensure that the planning
# units allocated to each zone form a separate contiguous unit,
# except for planning units allocated to zone 3 which do not need
# form a single contiguous unit
z5 <- diag(3)
z5[3, 3] <- 0
print(z5)
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 0
p5 <- p3 %>% add_contiguity_constraints(z5)
# create problem with added constraints that ensure that the planning
# units allocated to zones 1 and 2 form a contiguous unit
z6 <- diag(3)
z6[1, 2] <- 1
z6[2, 1] <- 1
print(z6)
#> [,1] [,2] [,3]
#> [1,] 1 1 0
#> [2,] 1 1 0
#> [3,] 0 0 1
p6 <- p3 %>% add_contiguity_constraints(z6)
# solve problems
s2 <- lapply(list(p3, p4, p5, p6), solve)
s2 <- lapply(s2, category_layer)
s2 <- terra::rast(s2)
names(s2) <- c("basic solution", "p4", "p5", "p6")
# plot solutions
plot(s2, axes = FALSE)
 # create a problem that has a main "reserve zone" and a secondary
# "corridor zone" to connect up import areas. Here, each feature has a
# target of 50% of its distribution. If a planning unit is allocated to the
# "reserve zone", then the prioritization accrues 100% of the amount of
# each feature in the planning unit. If a planning unit is allocated to the
# "corridor zone" then the prioritization accrues 40% of the amount of each
# feature in the planning unit. Also, the cost of managing a planning unit
# in the "corridor zone" is 30% of that when it is managed as the
# "reserve zone". Finally, the problem has constraints which
# ensure that all of the selected planning units form a single contiguous
# unit, so that the planning units allocated to the "corridor zone" can
# link up the planning units allocated to the "reserve zone"
# create planning unit data
pus <- sim_zones_pu_raster[[c(1, 1)]]
pus[[2]] <- pus[[2]] * 0.3
print(pus)
#> class : SpatRaster
#> size : 10, 10, 2 (nrow, ncol, nlyr)
#> resolution : 0.1, 0.1 (x, y)
#> extent : 0, 1, 0, 1 (xmin, xmax, ymin, ymax)
#> coord. ref. : WGS 84 / Pseudo-Mercator (EPSG:3857)
#> sources : sim_zones_pu_raster.tif
#> memory
#> varnames : sim_zones_pu_raster
#> sim_zones_pu_raster
#> names : zone_1, zone_1
#> min values : 190.132751, 57.039825
#> max values : 215.863846, 64.759154
# create biodiversity data
fts <- zones(
sim_features, sim_features * 0.4,
feature_names = names(sim_features),
zone_names = c("reserve zone", "corridor zone")
)
print(fts)
#> A zones object <ZonesSpatRaster/Zones>
#> • zones: "reserve zone" and "corridor zone" (2 total)
#> • features: "feature_1", "feature_2", "feature_3", "feature_4", and "feature_5" (5 total)
# create targets
targets <- tibble::tibble(
feature = names(sim_features),
zone = list(zone_names(fts))[rep(1, 5)],
target = terra::global(sim_features, "sum", na.rm = TRUE)[[1]] * 0.5,
type = rep("absolute", 5)
)
print(targets)
#> # A tibble: 5 × 4
#> feature zone target type
#> <chr> <list> <dbl> <chr>
#> 1 feature_1 <chr [2]> 41.6 absolute
#> 2 feature_2 <chr [2]> 15.6 absolute
#> 3 feature_3 <chr [2]> 36.0 absolute
#> 4 feature_4 <chr [2]> 21.3 absolute
#> 5 feature_5 <chr [2]> 28.4 absolute
# create zones matrix
z7 <- matrix(1, ncol = 2, nrow = 2)
print(z7)
#> [,1] [,2]
#> [1,] 1 1
#> [2,] 1 1
# create problem
p7 <-
problem(pus, fts) %>%
add_min_set_objective() %>%
add_manual_targets(targets) %>%
add_contiguity_constraints(z7) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# solve problems
s7 <- category_layer(solve(p7))
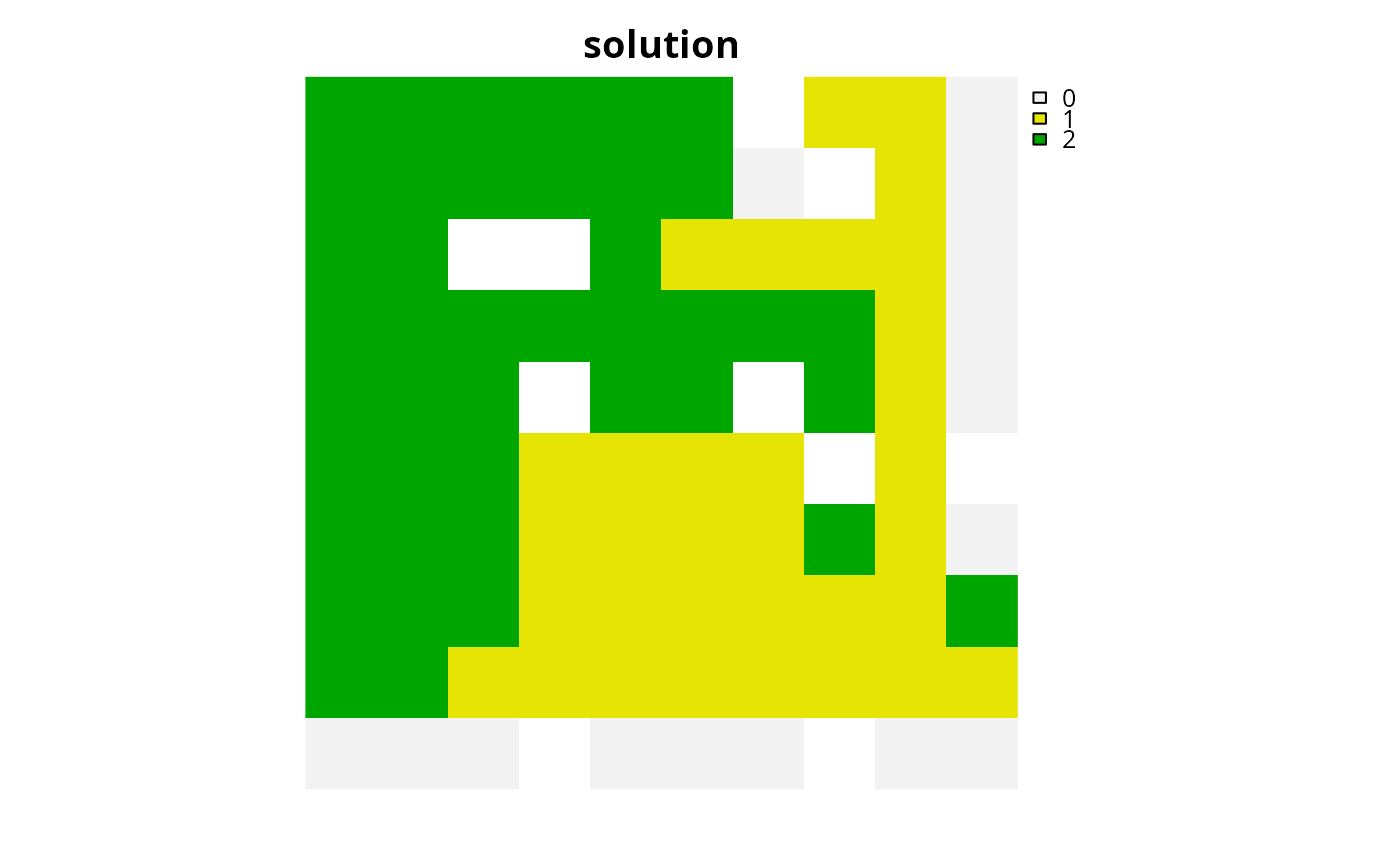
# plot solutions
plot(s7, main = "solution", axes = FALSE)
# create a problem that has a main "reserve zone" and a secondary
# "corridor zone" to connect up import areas. Here, each feature has a
# target of 50% of its distribution. If a planning unit is allocated to the
# "reserve zone", then the prioritization accrues 100% of the amount of
# each feature in the planning unit. If a planning unit is allocated to the
# "corridor zone" then the prioritization accrues 40% of the amount of each
# feature in the planning unit. Also, the cost of managing a planning unit
# in the "corridor zone" is 30% of that when it is managed as the
# "reserve zone". Finally, the problem has constraints which
# ensure that all of the selected planning units form a single contiguous
# unit, so that the planning units allocated to the "corridor zone" can
# link up the planning units allocated to the "reserve zone"
# create planning unit data
pus <- sim_zones_pu_raster[[c(1, 1)]]
pus[[2]] <- pus[[2]] * 0.3
print(pus)
#> class : SpatRaster
#> size : 10, 10, 2 (nrow, ncol, nlyr)
#> resolution : 0.1, 0.1 (x, y)
#> extent : 0, 1, 0, 1 (xmin, xmax, ymin, ymax)
#> coord. ref. : WGS 84 / Pseudo-Mercator (EPSG:3857)
#> sources : sim_zones_pu_raster.tif
#> memory
#> varnames : sim_zones_pu_raster
#> sim_zones_pu_raster
#> names : zone_1, zone_1
#> min values : 190.132751, 57.039825
#> max values : 215.863846, 64.759154
# create biodiversity data
fts <- zones(
sim_features, sim_features * 0.4,
feature_names = names(sim_features),
zone_names = c("reserve zone", "corridor zone")
)
print(fts)
#> A zones object <ZonesSpatRaster/Zones>
#> • zones: "reserve zone" and "corridor zone" (2 total)
#> • features: "feature_1", "feature_2", "feature_3", "feature_4", and "feature_5" (5 total)
# create targets
targets <- tibble::tibble(
feature = names(sim_features),
zone = list(zone_names(fts))[rep(1, 5)],
target = terra::global(sim_features, "sum", na.rm = TRUE)[[1]] * 0.5,
type = rep("absolute", 5)
)
print(targets)
#> # A tibble: 5 × 4
#> feature zone target type
#> <chr> <list> <dbl> <chr>
#> 1 feature_1 <chr [2]> 41.6 absolute
#> 2 feature_2 <chr [2]> 15.6 absolute
#> 3 feature_3 <chr [2]> 36.0 absolute
#> 4 feature_4 <chr [2]> 21.3 absolute
#> 5 feature_5 <chr [2]> 28.4 absolute
# create zones matrix
z7 <- matrix(1, ncol = 2, nrow = 2)
print(z7)
#> [,1] [,2]
#> [1,] 1 1
#> [2,] 1 1
# create problem
p7 <-
problem(pus, fts) %>%
add_min_set_objective() %>%
add_manual_targets(targets) %>%
add_contiguity_constraints(z7) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# solve problems
s7 <- category_layer(solve(p7))
# plot solutions
plot(s7, main = "solution", axes = FALSE)