Add feature contiguity constraints
Source:R/add_feature_contiguity_constraints.R
add_feature_contiguity_constraints.RdAdd constraints to a problem to ensure that each feature is
represented in a contiguous unit of dispersible habitat. These constraints
are a more advanced version of those implemented in the
add_contiguity_constraints() function, because they ensure that
each feature is represented in a contiguous unit and not that the entire
solution should form a contiguous unit. Additionally, this function
can use data showing the distribution of dispersible habitat for each
feature to ensure that all features can disperse throughout the areas
designated for their conservation.
Usage
# S4 method for class 'ConservationProblem,ANY,data.frame'
add_feature_contiguity_constraints(x, zones, data)
# S4 method for class 'ConservationProblem,ANY,matrix'
add_feature_contiguity_constraints(x, zones, data)
# S4 method for class 'ConservationProblem,ANY,ANY'
add_feature_contiguity_constraints(x, zones, data)Arguments
- x
problem()object.- zones
matrix,Matrixorlistobject describing the connection scheme for different zones. Formatrixor andMatrixformats, each row and column corresponds to a different zone inx, and cell values must contain binarynumericvalues (i.e., one or zero) that indicate if connected planning units (as specified bydata) should be still considered connected if they are allocated to different zones. The cell values along the diagonal of the matrix indicate if planning units should be subject to contiguity constraints when they are allocated to a given zone. Note thatzonesmust be symmetric, and that if a row or column has a value of one then the diagonal element for that row or column must also have a value of one. If the connection scheme between different zones should differ among the features, thenzonesshould be alistofmatrixorMatrixobjects that shows the specific scheme for each feature using the conventions described above. Defaults to an identity matrix (i.e., a matrix with ones along the matrix diagonal and zeros elsewhere), so that planning units are only considered connected if they are both allocated to the same zone.- data
NULL,matrix,Matrix,data.frameorlistofmatrix,Matrix, ordata.frameobjects. In particular,dataindicates which planning units should be treated as being connected when implementing constraints to ensure that features are represented in contiguous units. If different features have different dispersal capabilities, then it may be desirable to specify which sets of planning units should be treated as being connected for which features using alistof objects. Defaults toNULLsuch that the connection data are calculated automatically using theadjacency_matrix()function and so all adjacent planning units are treated as being connected for all features. See the Data format section for more information.
Value
An updated problem() object with the constraints added to it.
Details
This function uses connection data to identify solutions that represent features in contiguous units of dispersible habitat. It was inspired by the mathematical formulations detailed in Önal and Briers (2006) and Cardeira et al. 2010. For an example that has used these constraints, see Hanson et al. (2019). Please note that these constraints require the expanded formulation and therefore cannot be used with feature data that have negative vales. Please note that adding these constraints to a problem will drastically increase the amount of time required to solve it.
Data format
The following formats can be used to specify data.
dataas aNULLvalueHere connection data are calculated automatically using the
adjacency_matrix()function. This is the default and means that all adjacent planning units are treated as potentially dispersible for all features. Note that the connection data must be manually defined using one of the other formats below when the planning unit data inxis not spatially referenced (e.g., indata.frameornumericformat).dataas amatrix/MatrixobjectHere rows and columns correspond to different planning units and cell values indicates if a pair of planning units should be treated as connected or not. In particular, cell values should be binary
numericvalues (i.e., one or zero). Cells that occur along the matrix diagonal have no effect on the solution because each planning unit cannot be a connected with itself. Note that pairs of connected planning units are treated as being potentially dispersible for all features.dataas adata.frameobjectHere rows correspond to a pair of planning units and columns provide information about each pair of planning units. In particular,
datamust have the columns:"id1","id2", and"boundary". The"id1"and"id2"columns contain identifiers (indices) for a pair of planning units, and the"boundary"column contains binarynumericvalues that indicate if the two planning units specified in the"id1"and"id2"columns should be treated as connected or not. Note that pairs of connected planning units are treated as being potentially dispersible for all features.dataas alistobjectHere a
matrix,Matrix, ordata.frameobject is specified for each feature to indicate which planning units should be treated as connected for that feature. In particular, each element in thelistshould correspond to a different feature (specifically, a different target in the problem), and should contain amatrix,Matrix, ordata.frameobject that follows the formats described previously.
References
Önal H and Briers RA (2006) Optimal selection of a connected reserve network. Operations Research, 54: 379–388.
Cardeira JO, Pinto LS, Cabeza M and Gaston KJ (2010) Species specific connectivity in reserve-network design using graphs. Biological Conservation, 2: 408–415.
Hanson JO, Fuller RA, & Rhodes JR (2019) Conventional methods for enhancing connectivity in conservation planning do not always maintain gene flow. Journal of Applied Ecology, 56: 913–922.
See also
Other functions for adding constraints:
add_contiguity_constraints(),
add_cost_constraints(),
add_linear_constraints(),
add_locked_in_constraints(),
add_locked_out_constraints(),
add_mandatory_allocation_constraints(),
add_manual_bounded_constraints(),
add_manual_locked_constraints(),
add_neighbor_constraints()
Examples
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
sim_zones_pu_raster <- get_sim_zones_pu_raster()
sim_zones_features <- get_sim_zones_features()
# create minimal problem
p1 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_relative_targets(0.3) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# create problem with contiguity constraints
p2 <- p1 %>% add_contiguity_constraints()
# create problem with constraints to represent features in contiguous
# units
p3 <- p1 %>% add_feature_contiguity_constraints()
# create problem with constraints to represent features in contiguous
# units that contain highly suitable habitat values
# (specifically in the top 5th percentile)
cm4 <- lapply(seq_len(terra::nlyr(sim_features)), function(i) {
# create connectivity matrix using the i'th feature's habitat data
m <- connectivity_matrix(sim_pu_raster, sim_features[[i]])
# convert matrix to 0/1 values denoting values in top 5th percentile
m <- round(m > quantile(as.vector(m), 1 - 0.05, names = FALSE))
# remove 0s from the sparse matrix
m <- Matrix::drop0(m)
# return matrix
m
})
p4 <- p1 %>% add_feature_contiguity_constraints(data = cm4)
# solve problems
s1 <- c(solve(p1), solve(p2), solve(p3), solve(p4))
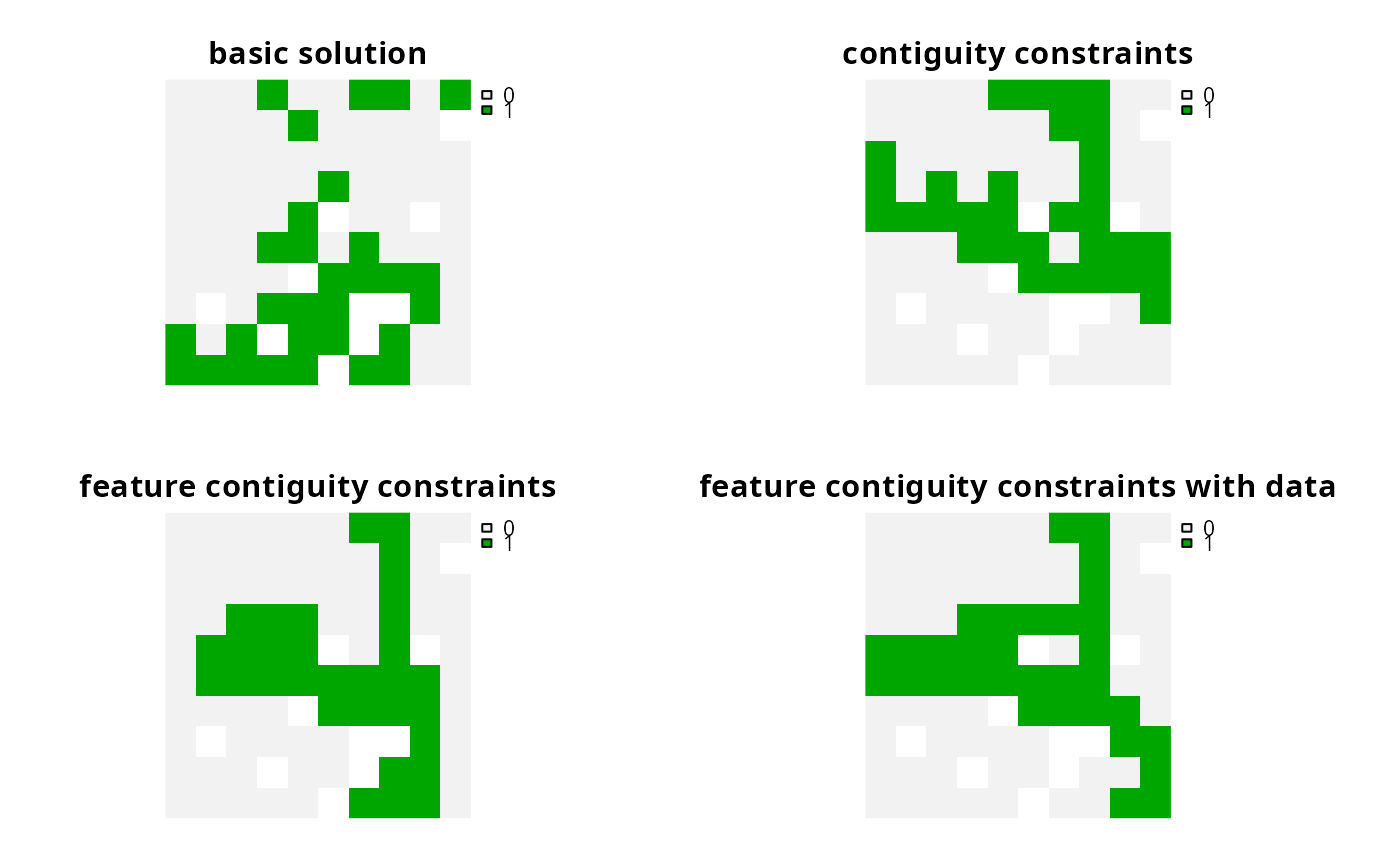
names(s1) <- c(
"basic solution", "contiguity constraints",
"feature contiguity constraints",
"feature contiguity constraints with data"
)
# plot solutions
plot(s1, axes = FALSE)
 # create minimal problem with multiple zones, and limit the solver to
# 30 seconds to obtain solutions in a feasible period of time
p5 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_relative_targets(matrix(0.1, ncol = 3, nrow = 5)) %>%
add_binary_decisions() %>%
add_default_solver(time_limit = 30, verbose = FALSE)
# create problem with contiguity constraints that specify that the
# planning units used to conserve each feature in different management
# zones must form separate contiguous units
p6 <- p5 %>% add_feature_contiguity_constraints(diag(3))
# create problem with contiguity constraints that specify that the
# planning units used to conserve each feature must form a single
# contiguous unit if the planning units are allocated to zones 1 and 2
# and do not need to form a single contiguous unit if they are allocated
# to zone 3
zm7 <- matrix(0, ncol = 3, nrow = 3)
zm7[seq_len(2), seq_len(2)] <- 1
print(zm7)
#> [,1] [,2] [,3]
#> [1,] 1 1 0
#> [2,] 1 1 0
#> [3,] 0 0 0
p7 <- p5 %>% add_feature_contiguity_constraints(zm7)
# create problem with contiguity constraints that specify that all of
# the planning units in all three of the zones must conserve first feature
# in a single contiguous unit but the planning units used to conserve the
# remaining features do not need to be contiguous in any way
zm8 <- lapply(
seq_len(number_of_features(sim_zones_features)),
function(i) matrix(ifelse(i == 1, 1, 0), ncol = 3, nrow = 3)
)
print(zm8)
#> [[1]]
#> [,1] [,2] [,3]
#> [1,] 1 1 1
#> [2,] 1 1 1
#> [3,] 1 1 1
#>
#> [[2]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
#> [[3]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
#> [[4]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
#> [[5]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
p8 <- p5 %>% add_feature_contiguity_constraints(zm8)
# solve problems
s2 <- lapply(list(p5, p6, p7, p8), solve)
s2 <- terra::rast(lapply(s2, category_layer))
names(s2) <- c("p5", "p6", "p7", "p8")
# plot solutions
plot(s2, axes = FALSE)
# create minimal problem with multiple zones, and limit the solver to
# 30 seconds to obtain solutions in a feasible period of time
p5 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_relative_targets(matrix(0.1, ncol = 3, nrow = 5)) %>%
add_binary_decisions() %>%
add_default_solver(time_limit = 30, verbose = FALSE)
# create problem with contiguity constraints that specify that the
# planning units used to conserve each feature in different management
# zones must form separate contiguous units
p6 <- p5 %>% add_feature_contiguity_constraints(diag(3))
# create problem with contiguity constraints that specify that the
# planning units used to conserve each feature must form a single
# contiguous unit if the planning units are allocated to zones 1 and 2
# and do not need to form a single contiguous unit if they are allocated
# to zone 3
zm7 <- matrix(0, ncol = 3, nrow = 3)
zm7[seq_len(2), seq_len(2)] <- 1
print(zm7)
#> [,1] [,2] [,3]
#> [1,] 1 1 0
#> [2,] 1 1 0
#> [3,] 0 0 0
p7 <- p5 %>% add_feature_contiguity_constraints(zm7)
# create problem with contiguity constraints that specify that all of
# the planning units in all three of the zones must conserve first feature
# in a single contiguous unit but the planning units used to conserve the
# remaining features do not need to be contiguous in any way
zm8 <- lapply(
seq_len(number_of_features(sim_zones_features)),
function(i) matrix(ifelse(i == 1, 1, 0), ncol = 3, nrow = 3)
)
print(zm8)
#> [[1]]
#> [,1] [,2] [,3]
#> [1,] 1 1 1
#> [2,] 1 1 1
#> [3,] 1 1 1
#>
#> [[2]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
#> [[3]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
#> [[4]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
#> [[5]]
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0
#>
p8 <- p5 %>% add_feature_contiguity_constraints(zm8)
# solve problems
s2 <- lapply(list(p5, p6, p7, p8), solve)
s2 <- terra::rast(lapply(s2, category_layer))
names(s2) <- c("p5", "p6", "p7", "p8")
# plot solutions
plot(s2, axes = FALSE)
