Add constraints to a conservation planning problem to ensure
that specific planning units are not selected
(or allocated to a specific zone) in the solution. For example, it may be
useful to lock out planning units that have been degraded and are not
suitable for conserving species. If specific planning units should be locked
in to the solution, use add_locked_in_constraints(). For
problems with non-binary planning unit allocations (e.g., proportions), the
add_manual_locked_constraints() function can be used to lock
planning unit allocations to a specific value.
Usage
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,numeric'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,logical'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,matrix'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,character'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,Spatial'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,sf'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,Raster'
add_locked_out_constraints(x, locked_out)
# S4 method for class 'ConservationProblem,SpatRaster'
add_locked_out_constraints(x, locked_out)Arguments
- x
problem()object.- locked_out
Object that determines which planning units should be locked out. See the Data format section for more information.
Value
An updated problem() object with the constraints added to it.
Data format
The following formats can be used to specify locked_out.
locked_outas anumericvectorHere
numericvalues are used to specify which planning units should be locked for the solution. Ifxhasdata.frameplanning units, then these values must refer to values in theidcolumn of the planning unit data. Alternatively, ifxhassf::st_sf()ormatrixplanning units, then these values must refer to the row numbers of the planning unit data. Additionally, ifxhasnumericvector planning units, then these values must refer to the element indices of the planning unit data. Finally, ifxhasterra::rast()planning units, then these values must refer to cell indices. Note that this format is only compatible ifxhas a single zone.locked_outas alogicalvectorHere
TRUE/FALSEvalues are used to specify each if planning unit should be locked for the solution. Note thatxshould have aTRUEorFALSEvalue for planning unit inx. Note that this format is only compatible ifxhas a single zone.locked_outas amatrixobjectHere
TRUE/FALSEvalues are used to specify each if each planning unit should be locked to a particular zone for the solution. Each row corresponds to a planning unit, each column corresponds to a zone, and each cell indicates if the planning unit should be locked to a given zone.locked_outas acharactervectorHere column name(s) for the planning unit data in
xare used to specify if planning units should be locked for the solution. This format is only compatible ifxhas planning units insf::st_sf()ordata.frameformat. These columns must havelogical(i.e.,TRUE/FALSE) values indicating if planning units should be locked for the solution. Ifxhas a single zone,locked_outmust contain a single column name. Otherwise, ifxhas multiple zones,locked_outmust contain a column name for each zone.locked_outas asf::sf()objectHere geometries of
locked_outare used to specify which planning units should be locked for the solution. Specifically, planning units inxthat spatially intersect withlocked_outwill be locked (perintersecting_units()). Note that this option is only compatible ifxhas a single zone.locked_outas aterra::rast()objectHere the cells in
locked_outare used to lock planning units for the solution. Specifically, planning units inxthat intersect with cells inlocked_outthat have non-zero and non-missing (NA) values will be locked. Ifxhas a single zone, thenlocked_outmust have a single layer. Otherwise, ifxhas multiple zones, thenlocked_outmust have a layer for each zone. Note that iflocked_outhas multiple layers, each cell must only contain a non-zero value in a single layer. Additionally, if the planning unit data inxis aterra::rast()object, we recommend standardizing missing (NA) values inlocked_outwith them to ensure that missing (NA) are consistent across both objects.
See also
Other functions for adding constraints:
add_contiguity_constraints(),
add_cost_constraints(),
add_feature_contiguity_constraints(),
add_linear_constraints(),
add_locked_in_constraints(),
add_mandatory_allocation_constraints(),
add_manual_bounded_constraints(),
add_manual_locked_constraints(),
add_neighbor_constraints()
Examples
# set seed for reproducibility
set.seed(500)
# load data
sim_pu_polygons <- get_sim_pu_polygons()
sim_features <- get_sim_features()
sim_locked_out_raster <- get_sim_locked_out_raster()
sim_zones_pu_raster <- get_sim_zones_pu_raster()
sim_zones_pu_polygons <- get_sim_zones_pu_polygons()
sim_zones_features <- get_sim_zones_features()
# create minimal problem
p1 <-
problem(sim_pu_polygons, sim_features, "cost") %>%
add_min_set_objective() %>%
add_relative_targets(0.2) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# create problem with added locked out constraints using integers
p2 <- p1 %>% add_locked_out_constraints(which(sim_pu_polygons$locked_out))
# create problem with added locked out constraints using a column name
p3 <- p1 %>% add_locked_out_constraints("locked_out")
# create problem with added locked out constraints using raster data
p4 <- p1 %>% add_locked_out_constraints(sim_locked_out_raster)
# create problem with added locked out constraints using spatial polygon data
locked_out <- sim_pu_polygons[sim_pu_polygons$locked_out == 1, ]
p5 <- p1 %>% add_locked_out_constraints(locked_out)
# solve problems
s1 <- solve(p1)
s2 <- solve(p2)
s3 <- solve(p3)
s4 <- solve(p4)
s5 <- solve(p5)
# create single object with all solutions
s6 <- sf::st_sf(
tibble::tibble(
s1 = s1$solution_1,
s2 = s2$solution_1,
s3 = s3$solution_1,
s4 = s4$solution_1,
s5 = s5$solution_1
),
geometry = sf::st_geometry(s1)
)
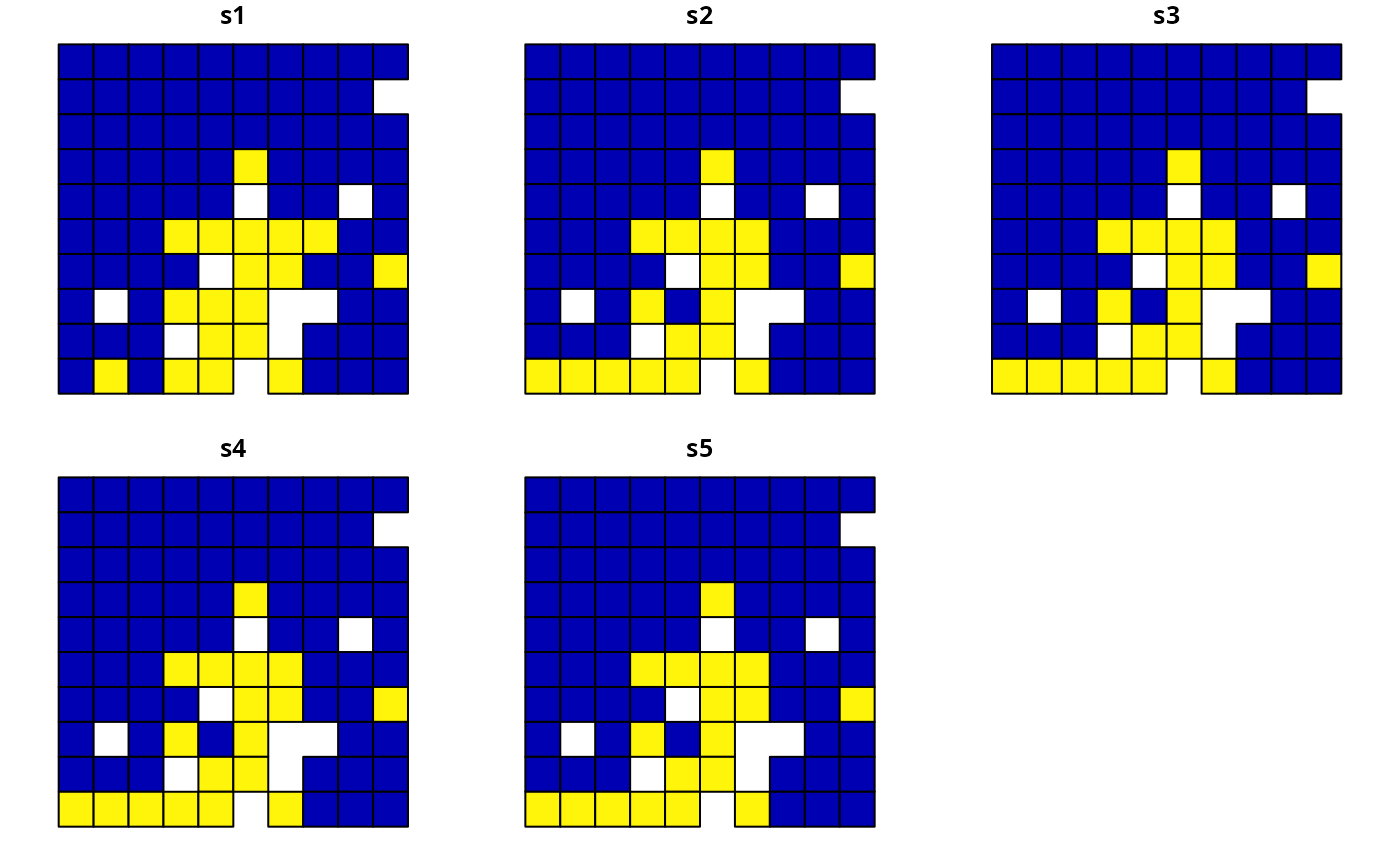
# plot solutions
plot(
s6,
main = c(
"none locked out", "locked out (integer input)",
"locked out (character input)", "locked out (raster input)",
"locked out (polygon input)"
)
)
 # reset plot
par(mfrow = c(1, 1))
# create minimal multi-zone problem with spatial data
p7 <-
problem(
sim_zones_pu_polygons, sim_zones_features,
cost_column = c("cost_1", "cost_2", "cost_3")
) %>%
add_min_set_objective() %>%
add_absolute_targets(matrix(rpois(15, 1), nrow = 5, ncol = 3)) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# create multi-zone problem with locked out constraints using matrix data
locked_matrix <- as.matrix(sf::st_drop_geometry(
sim_zones_pu_polygons[, c("locked_1", "locked_2", "locked_3")]
))
p8 <- p7 %>% add_locked_out_constraints(locked_matrix)
# solve problem
s8 <- solve(p8)
# create new column representing the zone id that each planning unit
# was allocated to in the solution
s8$solution <- category_vector(sf::st_drop_geometry(
s8[, c("solution_1_zone_1", "solution_1_zone_2", "solution_1_zone_3")]
))
s8$solution <- factor(s8$solution)
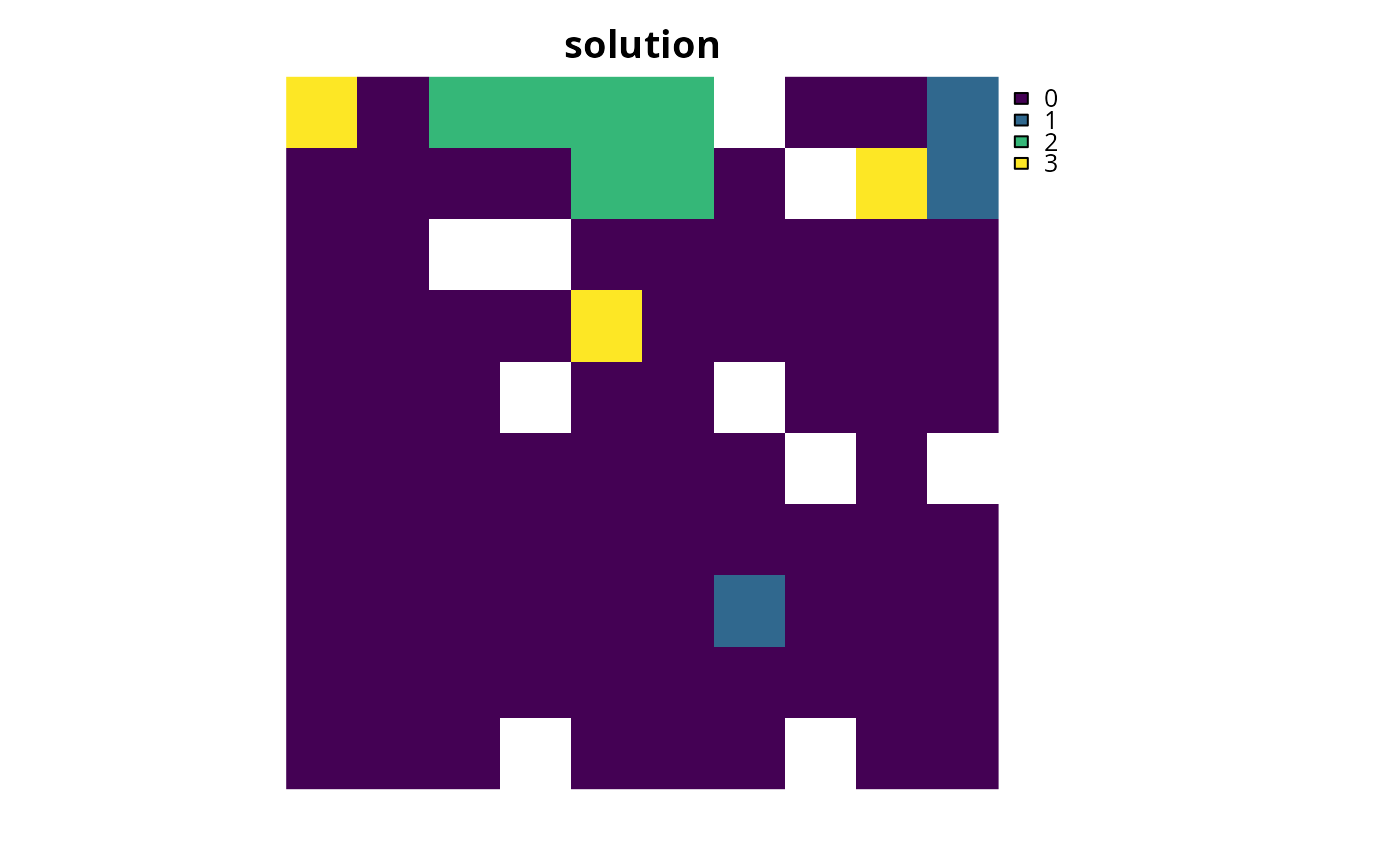
# plot solution
plot(s8[, "solution"], main = "solution", axes = FALSE)
# reset plot
par(mfrow = c(1, 1))
# create minimal multi-zone problem with spatial data
p7 <-
problem(
sim_zones_pu_polygons, sim_zones_features,
cost_column = c("cost_1", "cost_2", "cost_3")
) %>%
add_min_set_objective() %>%
add_absolute_targets(matrix(rpois(15, 1), nrow = 5, ncol = 3)) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# create multi-zone problem with locked out constraints using matrix data
locked_matrix <- as.matrix(sf::st_drop_geometry(
sim_zones_pu_polygons[, c("locked_1", "locked_2", "locked_3")]
))
p8 <- p7 %>% add_locked_out_constraints(locked_matrix)
# solve problem
s8 <- solve(p8)
# create new column representing the zone id that each planning unit
# was allocated to in the solution
s8$solution <- category_vector(sf::st_drop_geometry(
s8[, c("solution_1_zone_1", "solution_1_zone_2", "solution_1_zone_3")]
))
s8$solution <- factor(s8$solution)
# plot solution
plot(s8[, "solution"], main = "solution", axes = FALSE)
 # create multi-zone problem with locked out constraints using column names
p9 <-
p7 %>%
add_locked_out_constraints(c("locked_1", "locked_2", "locked_3"))
# solve problem
s9 <- solve(p9)
# create new column in s8 representing the zone id that each planning unit
# was allocated to in the solution
s9$solution <- category_vector(sf::st_drop_geometry(
s9[, c("solution_1_zone_1", "solution_1_zone_2", "solution_1_zone_3")]
))
s9$solution[s9$solution == 1 & s9$solution_1_zone_1 == 0] <- 0
s9$solution <- factor(s9$solution)
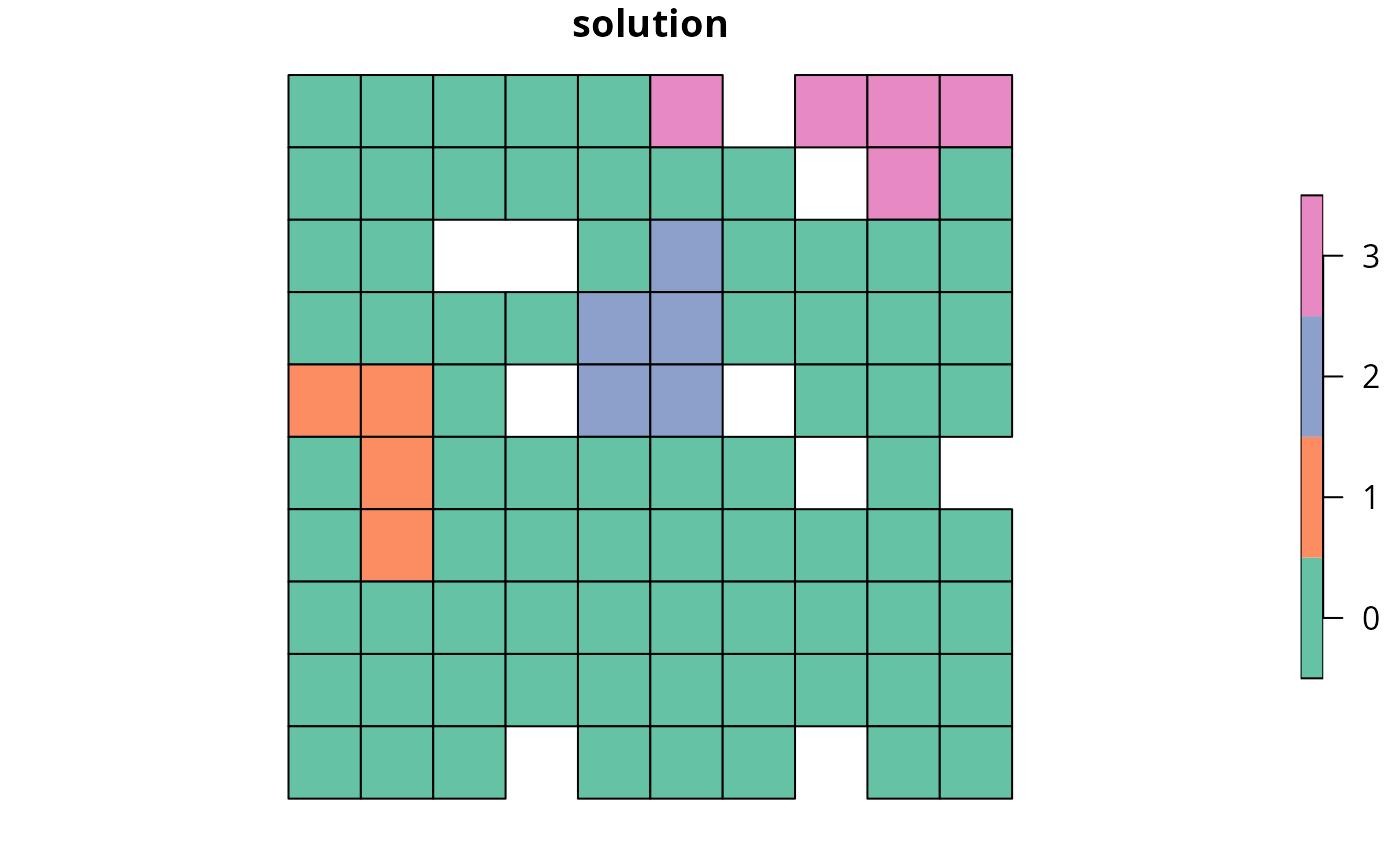
# plot solution
plot(s9[, "solution"], main = "solution", axes = FALSE)
# create multi-zone problem with raster planning units
p10 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_absolute_targets(matrix(rpois(15, 1), nrow = 5, ncol = 3)) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
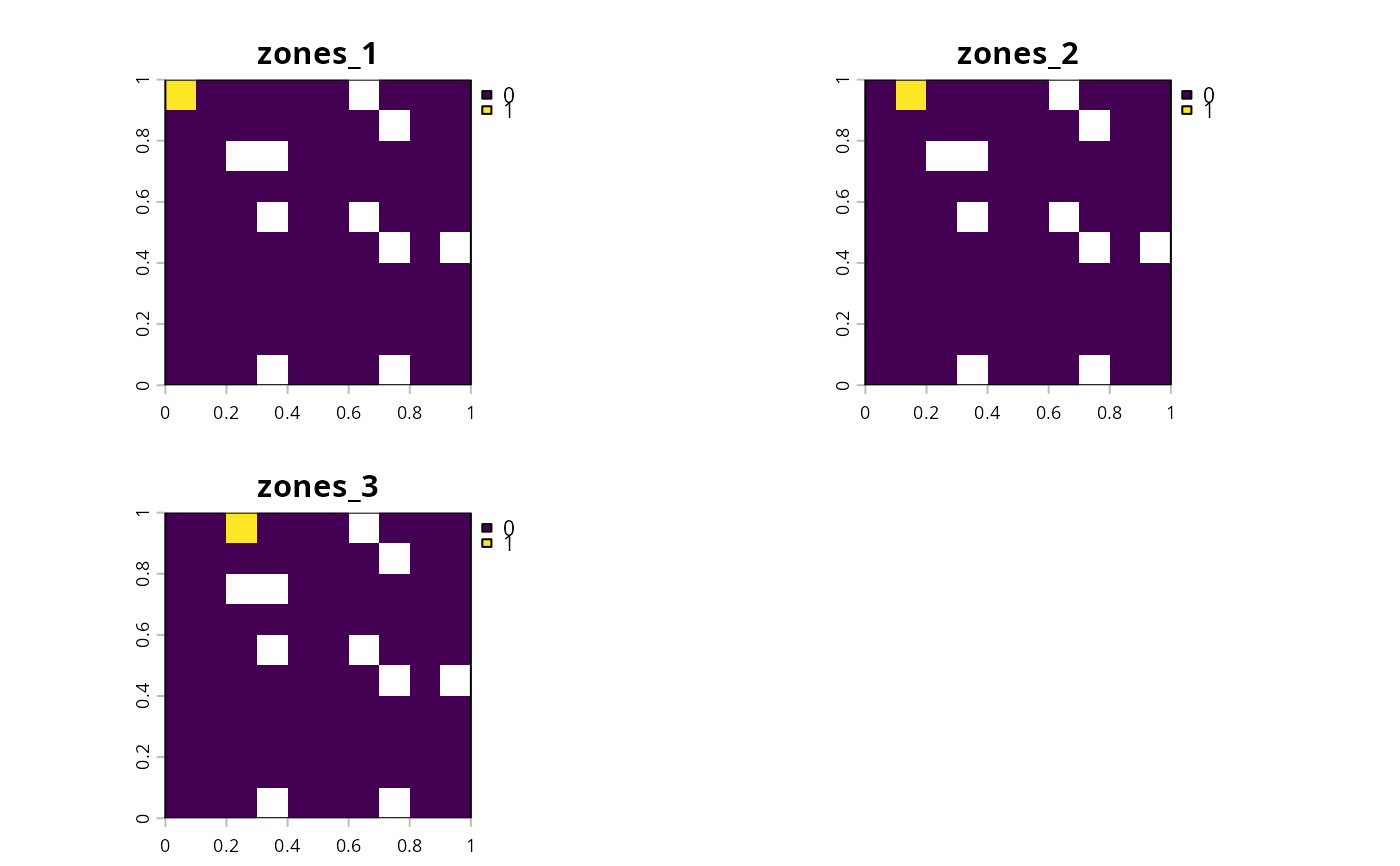
# create multi-layer raster with locked out units
locked_out_raster <- sim_zones_pu_raster[[1]]
locked_out_raster[!is.na(locked_out_raster)] <- 0
locked_out_raster <- locked_out_raster[[c(1, 1, 1)]]
names(locked_out_raster) <- c("zones_1", "zones_2", "zones_3")
locked_out_raster[[1]][1] <- 1
locked_out_raster[[2]][2] <- 1
locked_out_raster[[3]][3] <- 1
# plot locked out raster
plot(locked_out_raster)
# create multi-zone problem with locked out constraints using column names
p9 <-
p7 %>%
add_locked_out_constraints(c("locked_1", "locked_2", "locked_3"))
# solve problem
s9 <- solve(p9)
# create new column in s8 representing the zone id that each planning unit
# was allocated to in the solution
s9$solution <- category_vector(sf::st_drop_geometry(
s9[, c("solution_1_zone_1", "solution_1_zone_2", "solution_1_zone_3")]
))
s9$solution[s9$solution == 1 & s9$solution_1_zone_1 == 0] <- 0
s9$solution <- factor(s9$solution)
# plot solution
plot(s9[, "solution"], main = "solution", axes = FALSE)
# create multi-zone problem with raster planning units
p10 <-
problem(sim_zones_pu_raster, sim_zones_features) %>%
add_min_set_objective() %>%
add_absolute_targets(matrix(rpois(15, 1), nrow = 5, ncol = 3)) %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
# create multi-layer raster with locked out units
locked_out_raster <- sim_zones_pu_raster[[1]]
locked_out_raster[!is.na(locked_out_raster)] <- 0
locked_out_raster <- locked_out_raster[[c(1, 1, 1)]]
names(locked_out_raster) <- c("zones_1", "zones_2", "zones_3")
locked_out_raster[[1]][1] <- 1
locked_out_raster[[2]][2] <- 1
locked_out_raster[[3]][3] <- 1
# plot locked out raster
plot(locked_out_raster)
 # add locked out raster units to problem
p10 <- p10 %>% add_locked_out_constraints(locked_out_raster)
# solve problem
s10 <- solve(p10)
# plot solution
plot(category_layer(s10), main = "solution", axes = FALSE)
# add locked out raster units to problem
p10 <- p10 %>% add_locked_out_constraints(locked_out_raster)
# solve problem
s10 <- solve(p10)
# plot solution
plot(category_layer(s10), main = "solution", axes = FALSE)