Specify targets expressed as the
same values as the underlying feature data (ignoring any specified
feature units).
For example, setting a target of 10 for a feature specifies that a solution
should ideally select a set of planning units that contain a total
(summed) value of, at least, 10 for the feature.
This function is designed to be used with add_auto_targets().
Value
An object (TargetMethod) for specifying targets that
can be used with add_auto_targets() and add_group_targets()
to add targets to a problem().
Mathematical formulation
This method involves setting target thresholds based on a pre-specified
value.
To express this mathematically, we will define the following terminology.
Let \(a\) the absolute target for a feature
(per targets).
Given this terminology, the target threshold (\(t\)) for the feature
is calculated as follows.
$$t = a$$
See also
To add relative targets directly to a problem(), see
add_absolute_targets().
Other target setting methods:
spec_area_targets(),
spec_duran_targets(),
spec_interp_absolute_targets(),
spec_interp_area_targets(),
spec_jung_targets(),
spec_max_targets(),
spec_min_targets(),
spec_polak_targets(),
spec_pop_size_targets(),
spec_relative_targets(),
spec_rl_ecosystem_targets(),
spec_rl_species_targets(),
spec_rodrigues_targets(),
spec_rule_targets(),
spec_sreekar_targets(),
spec_ward_targets(),
spec_watson_targets(),
spec_wilson_targets()
Examples
# set seed for reproducibility
set.seed(500)
# load data
sim_pu_raster <- get_sim_pu_raster()
sim_features <- get_sim_features()
# create base problem
p0 <-
problem(sim_pu_raster, sim_features) %>%
add_min_set_objective() %>%
add_binary_decisions() %>%
add_default_solver(verbose = FALSE)
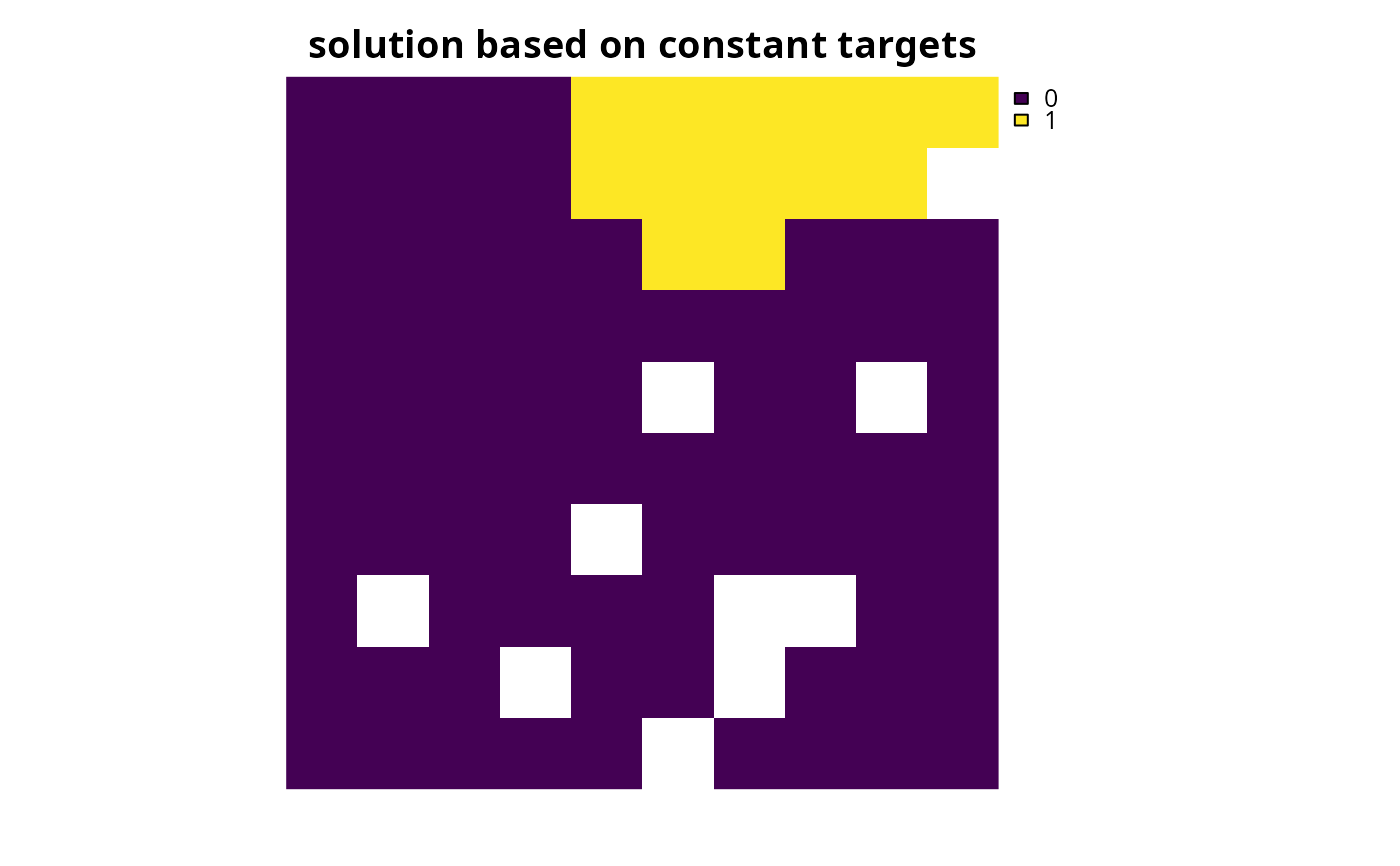
# this function sets targets based on the total abundance of the features
# (i.e., sum of planning unit values for the feature) and does not
# consider the spatial area covered by the planning units
# create problem with absolute targets of 5 for each feature
p1 <-
p0 %>%
add_auto_targets(method = spec_absolute_targets(targets = 5))
# solve problem
s1 <- solve(p1)
# plot solution
plot(s1, main = "solution based on constant targets", axes = FALSE)
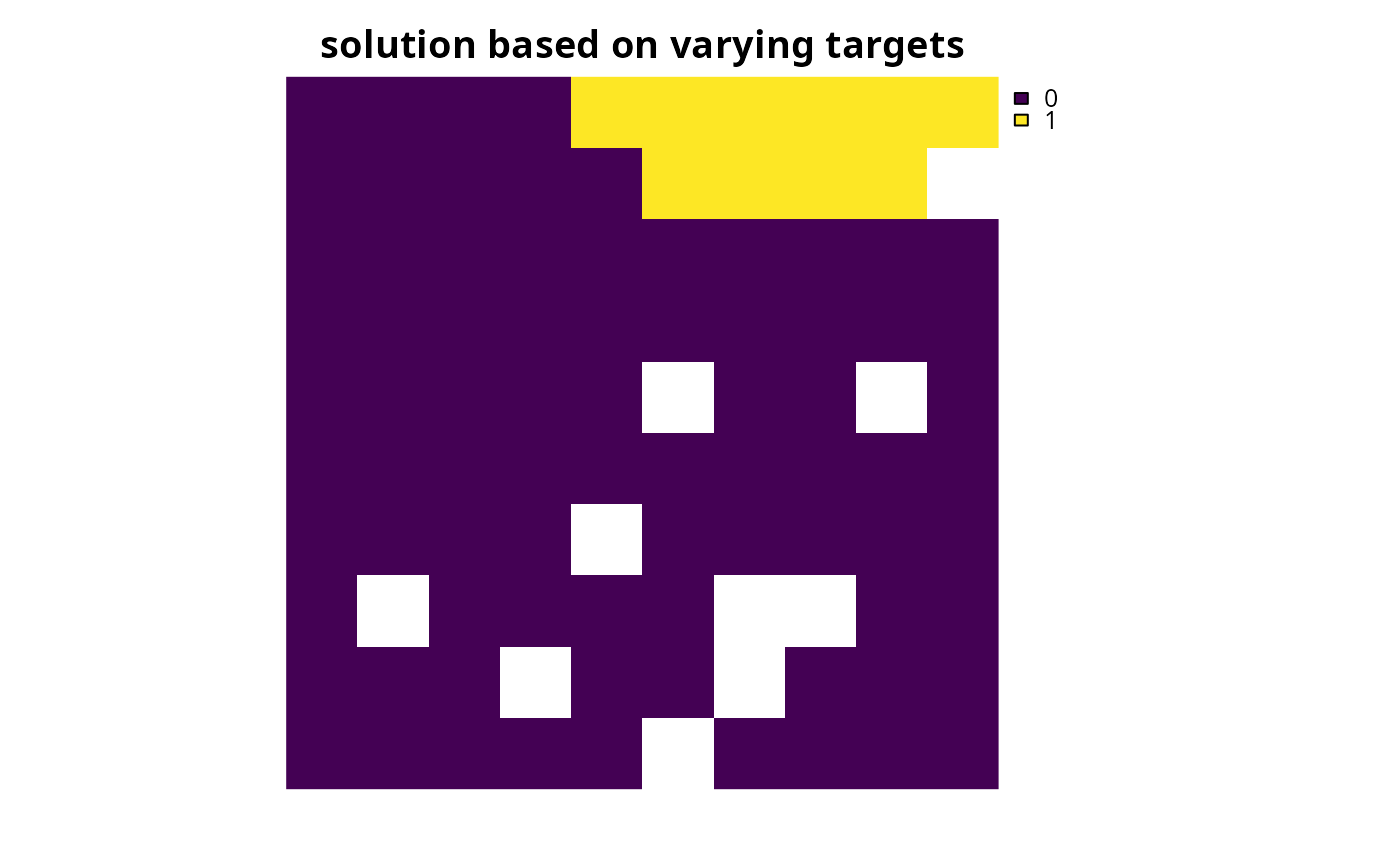
 # targets can also be specified for each feature separately.
# to demonstrate this, we will set a target value for each
# feature based on a random number between 1 and 5
target_values <- runif(terra::nlyr(sim_features), 1, 5)
# create problem with targets defined separately for each feature
p2 <-
p0 %>%
add_auto_targets(method = spec_absolute_targets(targets = target_values))
# solve problem
s2 <- solve(p2)
# plot solution
plot(s2, main = "solution based on varying targets", axes = FALSE)
# targets can also be specified for each feature separately.
# to demonstrate this, we will set a target value for each
# feature based on a random number between 1 and 5
target_values <- runif(terra::nlyr(sim_features), 1, 5)
# create problem with targets defined separately for each feature
p2 <-
p0 %>%
add_auto_targets(method = spec_absolute_targets(targets = target_values))
# solve problem
s2 <- solve(p2)
# plot solution
plot(s2, main = "solution based on varying targets", axes = FALSE)